Reaction wheels are crucial components for satellites of all shapes and sizes. They are becoming particularly important in the modern space industry, due to increasing demands for better for maneuverability, agility and precision control of small satellites.
In this article we take a high-level look at reaction wheel design, how reaction wheels work, and what to take into consideration when searching for a reaction wheel for your satellite. We also give an overview of some of the products currently available on the global marketplace for space.
If you would like to skip the introductory material and go straight to view the available products, please select options from the navigation menu below – in which the reaction wheels on the market are arranged by supplier.
Navigation
- What are reaction wheels?
- How do reaction wheels work?
- What benefits do reaction wheels bring to space missions?
- How to select the best reaction wheel for your needs
- Reaction wheels available on the global market
- AAC Clyde Space
- arcsec
- Berlin Space Technologies (BST)
- Bradford Space
- COMAT
- CubeSpace
- GranStal Solutions
- NewSpace Systems
- O.C.E. Technology
- Serenum Space
- VEOWARE SPACE
- ASPINA
- ASTROFEIN
- Canon Electronics
- Chang Guang Satellite
- Collins Aerospace
- Honeywell Aerospace
- Israel Aerospace Industries (IAI)
- Microsat Systems Canada
- Rocket Lab
- Spaceteq
- Surrey Satellite Technology Ltd (SSTL)
- Tamagawa seiki
- Vectronic Aerospace
- WITTENSTEIN cyber motor GmbH
- Share your reaction wheel requirements with satsearch for free procurement support
- Resources and further reading
What are reaction wheels?
Reaction wheels are internal mechanical components of controllable satellites and spacecraft that enable them to reposition while in orbit. They are sometimes referred to as momentum wheels.
Reaction wheels store rotational energy, providing satellites or spacecraft with three-axis attitude control without requiring external sources of torque (such as rockets or propellants), saving on weight and the available space.
Note that attitude in this context refers to the orientation of the satellite with respect to another object or frame of reference (such as a celestial sphere centred on Earth) and three-axis control refers to the typical x-y-z cartesian system used to specify an object’s location in three dimensions.
Reaction wheels control a satellite’s attitude with very high precision, which is critical for applications that require excellent pointing accuracy, such as for Earth Observation purposes, or to keep a telescope fixed towards a particular region of interest.

How do reaction wheels work?
Reaction wheel dynamics are relatively simple to understand. The satellite undergoes external torque from various sources (e.g. solar radiation pressure, Low Earth Orbit (LEO) aerodynamic forces and due to gravity gradient torque) that can disturb its position and path.
Reaction wheels are flywheels – devices that store rotational energy by conserving angular momentum and that enable the exchange of momentum within the satellite body in order to provide stability and counteract such disturbances.
They also provide a high pointing accuracy and so can precisely reorient a satellite to align an Earth Observation (EO) payload for example.
The benefit of using reaction wheels, rather than thrusters, to perform momentum exchange in these cases is that there is no need to use any fuel, saving costs and mass budget, and avoiding propellant safety issues.
Instead reaction wheels use a brushless DC electric motor connected to a spinning wheel, with the rotational speed controlled by the satellite’s on-board computer (OBC).
When they incorporate reaction wheels CubeSats also require a battery to power the motor, which is usually chargeable via solar panels, and momentum unloading using magnetorquers is required.
When operated, the reaction wheel causes the satellite body to counter-rotate – i.e. to rotate in the opposite direction to the wheel’s direction of rotation.
This rotation is carried out around the satellite’s center of mass. As the satellite is a closed system the total angular momentum must be conserved, therefore a reaction wheel cannot change a satellite’s location.
The direction of the satellite’s counter-rotation in response to a wheel’s rotation will only take place along one axis, depending on the axis of the wheel. Therefore for complete control of the entire system three reaction wheels must be used, in orthogonal orientation to each other.
What benefits do reaction wheels bring to space missions?
Despite the fact they do not use propellant, deployable parts, or significant power, reaction wheels can be very effective for rotational manoeuvring of a satellite or small spacecraft. They are often used alongside, or as an alternative to, control moment gyroscopes.
The major benefits of using reaction wheels (which are sometimes described as flywheels) for this purpose are:
Greater agility and versatility – a collection of reaction wheels can provide full three-axis control with a high level of responsive manipulation and predictable power, timing, and operational requirements. This can enable a greater range of mission functionality per unit mass than alternative solutions.
Improved safety – the lack of propellants, complicated signalling, external deployable or moving parts, significant thermal variations, and variable power requirements (that can cause short-term loads in circuit chokepoints) make for an overall safer and more reliable system.
Reduced Size, Weight, and Power (SWaP) requirements – a typical reaction wheel configuration can be lighter, smaller, and more power efficient than a three-axis attitude control system made up of alternative technologies. In particular, a significant saving on the payload fraction (in terms of both mass and volume) apportioned to propulsion fuel can be made. This makes reaction wheels a suitable option for missions looking to save on the SWaP budget.
Accuracy – high-quality reaction wheels, in the right configuration for a certain satellite setup, are capable of highly precise attitude changes and pointing manoeuvres.
Simplified engineering, testing, and qualification – with proven performance, integrated and modular configurations, and a lack of complex or dangerous materials and interfaces, the assembly and qualification of reaction wheels into a new satellite is a relatively straightforward task for an experienced space engineer. Any good supplier will also be available to provide integration and testing advice, data, and support throughout the process.
Now you have a better understanding of the range of benefits that reaction wheels can bring to your missions, read on to find out what the critical metrics and specifications are that should inform your choice from the array of systems on the market.

How to select the best reaction wheel for your needs
We suggest a basic four-step approach to selecting the right in-space propulsion system for your needs. This framework can also be used to select the optimum reaction wheel, and an overview is given below:
- Specify your exact mission parameters – ensure you are clear on the full range of activities your spacecraft needs to perform.
- Record all known design specifications of the satellite – keep to hand the current specifications of the craft (understanding these may change as the design evolves) – for example, it is vital that reaction wheel sizing is correct due to the impact on the system’s available volume.
- Consider the range of technology that will be used in the system – take into account the results of all decisions on what other components and sub-systems have been made. It is important that the reaction wheel you choose will work effectively with the other parts of the satellite.
- Take into account the key performance criteria – understand how to evaluate available reaction wheel products according to the criteria most relevant for your applications. More on this below.
For a reaction wheel the key performance criteria will include characteristics such as:
- Size/volume and weight
- Attitude control sensitivity and precision
- Control equipment, mechanisms and procedures
- Installation procedures and equipment
- Redundancy system (e.g. 4th wheel)
- Flight heritage, testing results and/or technology readiness level (TRL)
Reaction wheels available on the global market
In the article section below we have included a selection of the reaction wheel products currently available on the market.
Please note that this list will be updated when new products are added to the global marketplace for space – so please check back for more.
Get more information on all products listed at the click of a button
We can help you access quotes, lead times, or any other information from all of the suppliers listed below (and more) with our simple, free tender system. Just share your details with us and wait for the responses to arrive in your inbox.
AAC Clyde Space


The AAC Clyde Space RW222 is a reaction wheel designed to use in CubeSats and other pico- or nanosatellites to control their attitude. It features an internal fire-and-forget controller, which frees up the host processor’s workload. The product's standard configuration features up to 2mN.m torque and an I²C interface. Different interfaces are available on request. The RW222 is available with either 3.0 or 6.0 mN.m.s of momentum storage in both directions of rotation.

A reaction wheel designed for 6-12U CubeSats and similar platforms. Available in 3 models offering 15, 30 or 50 mN.m.s of angular momentum storage respectively in both directions. Up to 12 mN.m of torque enables rapid slewing operations for smallsats.

The AAC Clyde Space Trillian-1 is a reaction wheel for constellation deployment and small satellite missions with NASA GEVS acceptance levels. The system features a dedicated motor driver control circuit to command the reaction wheel. There are three operation modes: Torque, Speed, and Direct DAC control. The input filters of the system help in reducing the signal noise.
arcsec

The arcsec Zyra reaction wheel is a compact, low micro vibrations reaction wheel for CubeSats up to 12U. The wheel is equipped with custom drive electronics and internal speed control to offer high rotational speed accuracy and stability. The wheel is radiation-shielded and is offered with its mounting on 3 different planes for flexible integration.
Berlin Space Technologies (BST)

The RWA05 by Berlin Space Technologies is a reaction wheel assembly for small satellites with integrated fiber optical gyro. The integrated gyro enables precise speed, angular rate, and position control loops as they have been pioneered on Berlin satellites since 1994. The RWA05 comes in two versions: a high-voltage and a low-voltage variant.
The RWA05-24 by Berlin Space Technologies is a reaction wheel assembly for small satellites with integrated fiber optical gyro. The integrated gyro enables precise speed, angular rate, and position control loops as they have been pioneered on Berlin satellites since 1994. The RWA05 comes in two versions: a high-voltage and a low-voltage variant.
Bradford Space

The unit consists of a Reaction Wheel Assembly (RWA) and one Wheel Drive Electronics Box (WDE). The 5.2 kg, 168 W (maximum) power system has angular momentum storage of 18 N m s and a maximum angular speed 4000 rpm.

The Bradford Space Reaction Wheel Unit (RWU) W18E is a flight-proven reaction wheel with angular momentum storage of 22 N m s. It is made up of a Wheel Drive Electronics Box (WDE) and a Reaction Wheel Assembly (RWA) and has a high torque level across the full speed range.
The unit consists of a Reaction Wheel Assembly (RWA) and one Wheel Drive Electronics Box (WDE). The 6.02 kg, 168 W (maximum) power system has angular momentum storage of 25 N m s and a maximum angular speed 4000 rpm.
The unit consists of a Reaction Wheel Assembly (RWA) and one Wheel Drive Electronics Box (WDE). The 6.7 kg, 168 W (maximum) power system has angular momentum storage of 40 N m s and a maximum angular speed 4000 rpm.

The Bradford Space Reaction Wheel Unit (RWU) W45E is a space-proven reaction wheel with angular momentum storage of 45 N m s. It has a high torque level across the full speed range and is made up of a Wheel Drive Electronics Box (WDE) and a Reaction Wheel Assembly (RWA).
COMAT
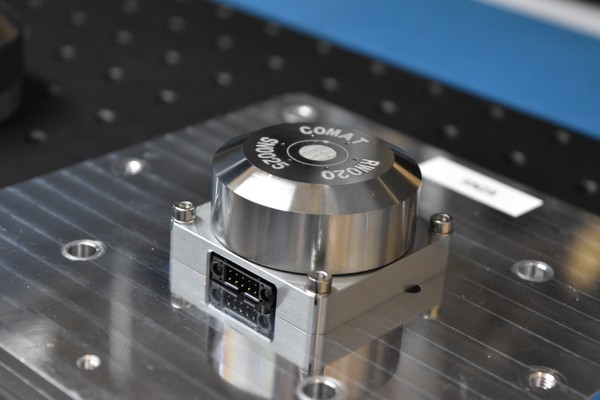
The COMAT Reaction Wheels 20 is designed for detumbling, attitude control, and torque or angular rate control of nanosatellites with a mean torque of 2 mNm. The system is fully characterized and qualified according to the European Cooperation for Space Standardization (ECSS) and has an 8 years lifetime duration.
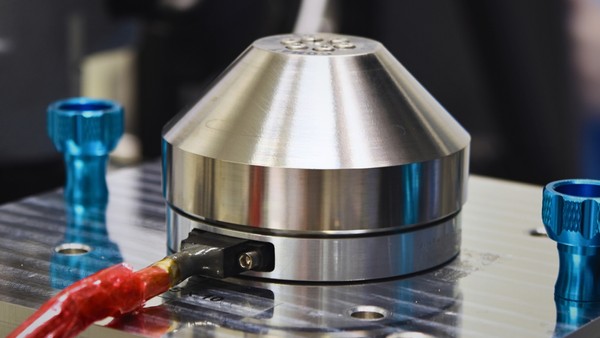
The COMAT Reaction Wheels 40 is designed for detumbling, attitude control, and torque or angular rate control of nanosatellites with a mean torque of 4 mNm. The system is fully characterized and qualified according to the European Cooperation for Space Standardization (ECSS) and has an 8 years lifetime duration.
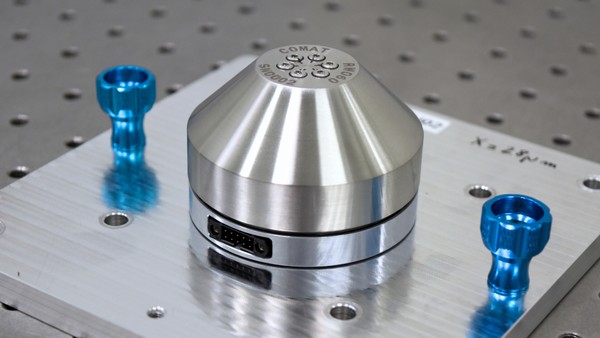
The COMAT Reaction Wheels 60 is designed for detumbling, attitude control, and torque or angular rate control of nanosatellites with a mean torque of 6 mNm. The system is fully characterized and qualified according to the European Cooperation for Space Standardization (ECSS) and has an 8 years lifetime duration.
CubeSpace

The CubeSpace Reaction Wheel CW0017 is a 1.77 mNms momentum reaction wheel with a mass of 60g and built in driver and interface electronics. The systems have improved vibration tolerance to withstand demanding mission requirements and are designed for CubeSat applications.

The CubeSpace Reaction Wheel CW0057 is a 5.7 mNms momentum reaction wheel with a mass of 115g and a rad-tolerant electronic drive circuit and speed controller. The systems have built in driver and interface electronics, are designed for CubeSat applications, and feature improved vibration tolerance to withstand demanding mission requirements.

The CubeSpace Reaction Wheel CW0162 is a 16.2 mNms momentum reaction wheel with a mass of 144g and built in interface and driver electronics. The systems are designed for CubeSat applications and feature improved vibration tolerance to withstand demanding mission requirements.

The CubeSpace Reaction Wheel CW0500 is a robust, reliable, and high-performance reaction wheel. The system is designed for precision performance, reliability, ease of use, and manufacturability. It features a modular, space-proven design with in-house designed motors, high-load space-rated bearings, and advanced lubrication, and can be easily optimized to meet mission-specific requirements by adjusting the motor or using alternative bearings or lubrication.

The CubeSpace Reaction Wheel CW1200 (0,12 Nms) is a robust, reliable, and high-performance reaction wheel. The system is designed for precision performance, reliability, ease of use, and manufacturability. It features a modular, space-proven design with in-house designed motors, high-load space-rated bearings, and advanced lubrication, and can be easily optimized to meet mission-specific requirements by adjusting the motor or using alternative bearings or lubrication.

The CubeSpace Reaction Wheel CW2500 (0,25 Nms) is a robust, reliable, and high-performance reaction wheel. The system is designed for precision performance, reliability, ease of use, and manufacturability. It features a modular, space-proven design with in-house designed motors, high-load space-rated bearings, and advanced lubrication, and can be easily optimized to meet mission-specific requirements by adjusting the motor or using alternative bearings or lubrication.

The CubeSpace Reaction Wheel CW5000 (0,5 Nms) is a robust, reliable, and high-performance reaction wheel. The system is designed for precision performance, reliability, ease of use, and manufacturability. It features a modular, space-proven design with in-house designed motors, high-load space-rated bearings, and advanced lubrication, and can be easily optimized to meet mission-specific requirements by adjusting the motor or using alternative bearings or lubrication.

The CubeSpace Reaction Wheel CW10K (1 Nms) is a robust, reliable, and high-performance reaction wheel. The system is designed for precision performance, reliability, ease of use, and manufacturability. It features a modular, space-proven design with in-house designed motors, high-load space-rated bearings, and advanced lubrication, and can be easily optimized to meet mission-specific requirements by adjusting the motor or using alternative bearings or lubrication.

The CubeSpace Reaction Wheel CW40K (4 Nms) is a robust, reliable, and high-performance reaction wheel. The system is designed for precision performance, reliability, ease of use, and manufacturability. It features a modular, space-proven design with in-house designed motors, high-load space-rated bearings, and advanced lubrication, and can be easily optimized to meet mission-specific requirements by adjusting the motor or using alternative bearings or lubrication.
GranStal Solutions

The GS-RW series reaction wheels are low mass, low power reaction control wheels, which allow CubeSats and other pico- or nano-satellites to control their attitude. They are designed for 1 to 3U CubeSat platforms.
NewSpace Systems

A high-performance alternative to a propulsion-based reaction control system, reaction wheels provide spacecraft with control torque by means of momentum exchange between the satellite body and the rotating wheel.

A high-performance alternative to a propulsion-based reaction control system, reaction wheels provide spacecraft with control torque by means of momentum exchange between the satellite body and the rotating wheel.

A high-performance alternative to a propulsion-based reaction control system, reaction wheels provide spacecraft with control torque by means of momentum exchange between the satellite body and the rotating wheel.
O.C.E. Technology

The O.C.E. Technology RW5 Single Axis Micro Wheel 500mNms is a reaction wheel designed for nanosatellites. It consists of an electromechanical structure with light weight design. The product also consists of several military components including digital controlling electronics, ball bearing, driving motor and connecting cable.

The O.C.E. Technology RW40 Reaction Wheel 4Nms is a small and light weight reaction wheel designed for small satellites. It consists of motor, housing and controlling electronic subassembly including software. It is primarily used in satellites designed for rapid response applications.

The O.C.E. Technology RW150 Reaction Wheel 15Nms is designed to use in small and medium-sized satellites. It consists of ball bearing unit, rotating mass, housing, controlling electronic subassembly including software, photoelectric encode subassembly, motor and connectors. It is primarily used in satellites designed for remote sensing applications.

The O.C.E. Technology RW250 Reaction Wheel 25Nms designed for small satellites operating in the Medium Earth Orbit (MEO) and Low Earth Orbit(LEO). It is the first digital reaction flywheel based on FPGA control electronics. RW250 is primarily used in communication satellites.

The O.C.E. Technology RW250B Momentum Wheel 25Nms B is designed for satellites operating in High Earth Orbit(HEO), and Medium Earth Orbit (MEO). It consists of internal wheel drive electronic, which could work as momentum flywheel or reaction flywheel. Its operational mode is torque-mode. RW250B is primarily used in meteorological satellites.

The O.C.E. Technology RW500 SGCMG-50Nms is a reaction wheel designed for satellites operating in the High Earth Orbit(HEO), Medium Earth Orbit (MEO) and Low Earth Orbit(LEO). It consists of wheel, slip ring, photoelectric encoder and PMSM motor. RW500 is capable of tracking rapid exchange of angular momentum of the aerospace craft for elevating the maneuverability.

The O.C.E. Technology OCE-RW1000 Large Torque Reaction Wheel 1Nm is designed for small satellites. It consists of ball bearing unit, rotating mass, housing, controlling electronic subassembly including software and photoelectric encode subassembly. OCE-RW1000 is primarily used in rapid respond series satellites which require a large output torque.
Serenum Space

The Serenum Space RW25 CubeSat Reaction Wheel is designed for 1U to 6U sized CubeSat missions. Some of its key features include fine pointing maneuvers, advanced attitude control including freeze mode, and low vibration design. It is mainly suitable for earth observation missions.
VEOWARE SPACE

The VEOWARE SPACE WHL-100 Reaction Wheel is a low power system with momentum capacity of 100 mNms. The compact design features regenerative braking and offers firmware updating in orbit.

The VEOWARE SPACE WHL-200 Reaction Wheel is a high torque, low volume, and fully integrated design. The system has space heritage and is suitable for CubeSats from 16 - 27U.

The VEOWARE SPACE WHL-500 Reaction Wheel is designed for for 35 to 100kg Satellites (and not 50kg). The system is fully integrated and is designed to offer high torque in a low power and low volume setup. Multiple WHL-500 systems can be used in combination to satisfy different mission requirements. The WHL-500 has been designed to minimize microvibrations and tested to ensure optimal performance with low jitter and low torque noise (microvibration test and jitter analysis available upon request).
ASPINA
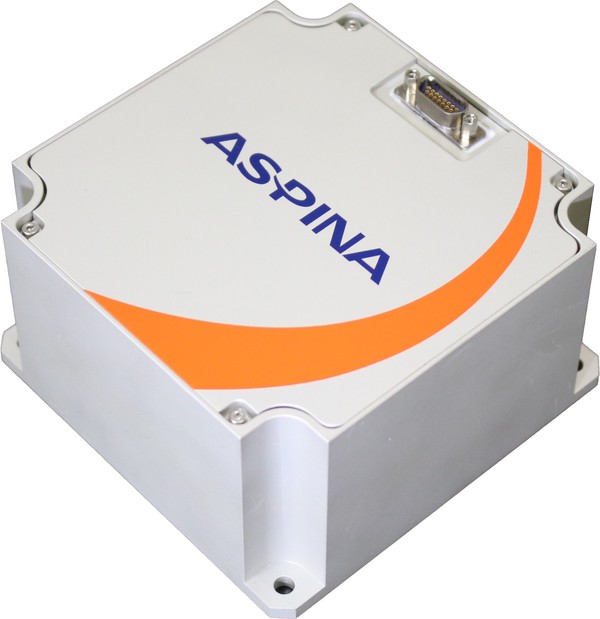
ASPINA's ARW-100 Reaction Wheel is suitable for small satellites operating in Low Earth Orbit. Build-to-order with 3-6 month lead time from ASPINA's Japan factory.
[IN-DEVELOPMENT] ASPINA's ARW-200 Reaction Wheel is intended for small satellites operating in Low Earth Orbit.
ASTROFEIN

The Astrofein Reaction Wheel - RW 1 Type A is a 24g system with a nominal torque of 23 E-6Nm, with a PI controller and WE for up to 4 wheels.

The Astrofein Reaction Wheel - RW 1 Type B is a 15g system with a nominal torque of 4 E-6Nm, with a PI controller and WE for up to 4 wheels.

The Astrofein Reaction Wheel - RW25 is a nanosatellite wheel with integrated electronics enabling independent operation via digital interface.

The Astrofein Reaction Wheel - RW35 features integrated wheel drive electronics, with latch-up protection, and a variety of operational modes.

The Astrofein Reaction Wheel - RW100 is designed for constellations, with an optimized production process and angular momentum of 0.4 Nms.

The Astrofein Reaction Wheel - RW150 has angular momentum of 1.0 Nms and features integrated wheel drive electronics with low noise.

The Astrofein Reaction Wheel - RW250 features integrated wheel drive electronics and has angular momentum of 4.0 Nms.

The Astrofein Reaction Wheel - RWT250 supports a variety of operational modes and has angular momentum of 4.0 Nms
Canon Electronics

The CE-RW005 Reaction Wheel is an actuator for controlling spacecraft attitude via momentum transfer to a rotating wheel (mass).
Chang Guang Satellite

The Chang Guang Satellite Flywheel is designed to offer control of the satellite’s flying attitude under the steady state. It features optimized size and weight, supports both speed and torque controlling modes, and heritage on several satellites of Jilin-1 series.
Collins Aerospace

The Collins Aerospace RSI 4-75/60 is a high motor torque momentum wheel with integrated electronics. Part of the TELDIX® Space Wheels range, the 4 Nms system is hermetically sealed and optimized for both mass and power ratings.

The Collins Aerospace RSI 12-75/60 reaction wheel is a 12 Nms system with integrated wheel drive electronics. Part of the TELDIX® Space Wheels range, the system is hermetically sealed and optimized for both mass and power ratings.

The Collins Aerospace RSI 15-215/20 reaction wheel is a 15 Nms system, part of the TELDIX® Space Wheels range. The system features integrated wheel drive electronics, is hermetically sealed, and has been optimized for both mass and power ratings.

The Collins Aerospace RSI 45-75/60 reaction wheel is a modular, 45 Nms system with integrated electronics. Part of the TELDIX® Space Wheels range, the RSI 45-75/60 reaction wheel is space-qualified and features integrated wheel drive electronics in a hermetically sealed enclosure.

The Collins Aerospace RSI 18-220/45 reaction wheel is a high motor torque momentum wheel with integrated electronics. The 18 Nms system has a modular configuration and is hermetically sealed.

The Collins Aerospace RSI 30-280/30 reaction wheel is a 30 Nms system with modular configuration. It is hermetically sealed, space-qualified, and features integrated wheel drive electronics.

The Collins Aerospace RSI 68-170/60 reaction wheel is a 68 Nms system with integrated wheel drive electronics. It is hermetically sealed, space-qualified, and has a modular configuration.

The Collins Aerospace RDR 68 Momentum and Reaction Wheels are 14–68 Nms systems with external wheel drive electronics. Part of the TELDIX® Space Wheels range, the systems are modular, hermetically sealed, and optimized for both mass and power ratings.
Honeywell Aerospace

The Honeywell Aerospace HR04 Reaction Wheel Assembly (RWA) is a high-output, low-jitter flywheel for precision position and pointing control.

The Honeywell Aerospace HC7 Reaction Wheel Assembly (RWA) is a features plug-and-play ACS insertion and minimized vehicle integration time.

The Honeywell Aerospace HC9 Reaction Wheel Assembly (RWA) is a scalable, integrated system with low jitter performance.
Israel Aerospace Industries (IAI)

The IAI Tamam Reaction Wheel Assembly 1.2Nm is a balanced flywheel, suspended on a ball bearing, driven by a brushless DC motor.
Microsat Systems Canada

The Microsat Systems Canada Inc. (MSCI) MicroWheel 200 is a miniature reaction wheel and angular momentum storage device for mini-satellites and microsatellites. Part of MSCI’s High Performance Attitude Control product line, the system is a “smart” sensor/actuator pair, including both a reaction wheel and an optional solid-state angular rate sensor, both operated locally by an embedded microcontroller.

The Microsat Systems Canada Inc. (MSCI) MicroWheel 1000 is a reaction wheel for small satellites requiring less than 1000 mNms of momentum storage. The system is a “smart” sensor/actuator pair, including both a reaction wheel and an optional solid-state angular rate sensor, operated by an embedded microcontroller.
The Microsat Systems Canada Inc. (MSCI) MicroWheel 4000 is a miniature reaction wheel with 4 Nms of momentum storage. The system is a “smart” sensor/actuator pair, including both a reaction wheel and an optional solid-state angular rate sensor, operated locally by an embedded microcontroller, and is part of MSCI’s High Performance Attitude Control product line.
Rocket Lab

Rocket Lab's RW-0.003 Reaction Wheels are so tiny that 3 wheels can be carried in a 1U Cubesat. A 4-wheel pyramid configuration is also possible.



Rocket Lab's 60 mNms RW-0.06 Reaction Wheel packs high-torque motor phase current control electronics into a small package.

Rocket Lab's RW-0.2 Reaction Wheel is designed for high-agility remote sensing or science microsatellites and it's optimized for radiation hardness.
Rocket Lab's RW-0.4 Reaction Wheel is designed for high-agility remote sensing or science microsatellites and it's optimized for radiation hardness.
1Nms RW-1.0 Reaction Wheel is Rocket Lab's largest wheel, suitable for 100 kg Earth-observation missions.
The Rocket Lab 12.0 Nms RWA - RW5 is a radiation-hardened reaction wheel designed for satellite applications. It has a momentum of +/-12 Nms and a torque of +/-0.2 Nm. The RW4 requires a supply voltage between 24 V to 34 V. It has the capability to operate in temperatures between -20 to 60° C.

The Rocket Lab 12.0 Nms RWA - RW5 is a radiation-hardened reaction wheel designed for satellite applications. It has a momentum of +/-12 Nms and a torque of +/-0.2 Nm. The RW4 requires a supply voltage between 24 V to 34 V. It has the capability to operate in temperatures between -20 to 60° C.
Spaceteq

The RW-10NMS reaction wheel is designed for small to medium size LEO satellites which require highly stabilised, 3-axis controlled, agile platforms. It can be used as both a torque actuator and momentum storage device and can be controlled with speed and torque commands.
Surrey Satellite Technology Ltd (SSTL)



The SSTL GEO Wheel is a GEO reaction wheel with integrated rad-hard electronics and a 15 year lifetime.
Tamagawa seiki

The Tamagawa seiki Co,.Ltd. Reaction Wheel is a low-cost attitude control system with 0.3 Nms or 0.2 Nms angular momentum.
Vectronic Aerospace

The VECTRONIC Aerospace VRW-A-05 Reaction Wheel is a 1.3 kg system with a maximum angular momentum of 0.69 Nms.

The VECTRONIC Aerospace VRW-A-1 Reaction Wheel is a 1.9 kg system with a maximum angular momentum of 1.25 Nms.

The VECTRONIC Aerospace VRW-B-025 Reaction Wheel is a 1.2 kg system with a maximum angular momentum of 0.29 Nms.

The VECTRONIC Aerospace VRW-B-02 Reaction Wheel is a 1.0 kg system with a maximum angular momentum of 0.20 Nms.

The VECTRONIC Aerospace VRW-C-03 Reaction Wheel is a 0.9 kg system with a maximum angular momentum of 0.35 Nms.

The VECTRONIC Aerospace VRW-C-05 Reaction Wheel is a 1.2 kg system with a maximum angular momentum of 0.60 Nms.

The VECTRONIC Aerospace VRW-C-1 Reaction Wheel is a 2.3 kg system with a maximum angular momentum of 1.20 Nms.

The VECTRONIC Aerospace VRW-D-1 Reaction Wheel is a 1.9 kg system with a maximum angular momentum of 1.20 Nms.

The VECTRONIC Aerospace VRW-D-16 Reaction Wheel is a 1.8 kg system with a maximum angular momentum of 1.60 Nms.

The VECTRONIC Aerospace VRW-D-2 Reaction Wheel is a 2.0 kg system with a maximum angular momentum of 2.00 Nms.

The VECTRONIC Aerospace VRW-D-4 Reaction Wheel is a 2.5 kg system with a maximum angular momentum of 4.00 Nms.

The VECTRONIC Aerospace VRW-D-6 Reaction Wheel is a 3.0 kg system with a maximum angular momentum of 3.0 Nms.
WITTENSTEIN cyber motor GmbH

A 30g and 20 × 20 × 20 mm3 reaction wheel designed for 1-8U satellites. The system provides 2.0 mN m s of momentum storage at a nominal voltage of 5V and can be used in different configurations. It also features vacuum-rated bearings and components resisting radiation up to 200 Gy.
Need help finding the best solution?
Share your requirements with us now
Would you like to be featured on satsearch?
Click here to get started today
Share your reaction wheel requirements with satsearch for free procurement support
If you would like any further advice or support in finding the best reaction wheel for your mission, please get in touch with satsearch today.
We offer 100% free and no-obligation procurement support for engineers at all levels, right across the global industry. Our experienced team would be happy to help.
Simply click here and share a few details about your requirements to get started.
Have you noticed that your product isn’t included in this article? Send us an email today. We’d be happy to work with you to showcase it to the satsearch community.
You can also find out more about how to leverage our extensive community of qualified space industry buyers to build your business, in the Satsearch Membership Program here.
Resources and further reading
- Reaction wheels on the global market
- How to choose the right smallsat ADCS – a satsearch webinar
- About reaction wheels – Wikipedia
- Reaction wheels ensure satellites maintain the right attitude: Part 1 – Microcontroller Tips
- Reaction Wheels – Satellite Wiki
- Attitude actuators on satsearch
Related technologies and more
At the links below you can find a range of satsearch articles that will be useful for learning more about this topic, or that feature other categories of technologies which you may need to consider in your mission.
- Satellite electrical power systems (EPS) on the global market
- CubeSat thrusters and in-space propulsion
- Software-defined radios (SDRs) for space
- On-board computers (OBCs) for space
- Optical payloads for space
- Satellite software providers on the global market
- Payload processors for satellites
- A brief introduction to the space supply chain
- Control moment gyroscopes for space