The Attitude Determination and Control System (ADCS) is a vital sub-system of a small satellite. It is used for a variety of applications, such as to provide pointing stability and precision orientation in order to maximize the value and utility of a payload.
But selecting the best ADCS for a small satellite isn’t straightforward.
The video is a recording of a satsearch webinar entitled a guide to selecting an ADCS for a small satellite mission.
It features experts from 6 different ADCS manufacturers, based around the world, each discuss their technologies and missions, and share how engineers can better integrate and use the equipment.
Contents
Presenters
The 6 presenters at the event are all paying members of the satsearch membership program.
The individual slide decks for the presentations are freely available on each company’s supplier hub linked to below, alongside each speaker’s details (in order of appearance):
- Tjorven Delabie, CEO of arcsec
- Gerhard Van Vuuren, Principal ADCS Engineer at CubeSpace ADCS
- James Barrington-Brown, CEO of NewSpace Systems
- Jacob Nissen, Chief Sales Officer of Space Inventor
- Thomas Yen, CEO of Tensor Tech CO., LTD.
- Arne Broeders Embedded Software Engineer at VEOWARE SPACE
Products
The following systems are all manufactured by the satsearch members who presented in the webinar and were each referenced in the talks, or are related to the products discussed:


The arcsec Arcus ADCS is an attitude determination and control system designed for precise control in a compact package. The system features 3 gyroscopes, 6 photodiodes, 3 magnetometers, and 1 star tracker for attitude determination along with 3 reaction wheels and 3 magnetorquers for agile attitude control.

The CubeSpace CubeADCS Core is designed for CubeSat applications. The system is flexible and has the ability to adapt to customers' satellite mechanics and electronics. It is robust and can operate seamlessly in orbit. The ADCS system is scalable both in performance and size.

The NewSpace Systems MicroSat Closed-Loop ADCS is a customizable, technology-agnostic, turnkey Attitude Determination and Control (ADCS) for microsats. Based on sensor data the system can determine and implement the required control torques to reorient a microsatellite for safety reasons, or to meet changing mission objectives. The custom nature of the ADCS reduces the burden on engineering teams during satellite and mission development.
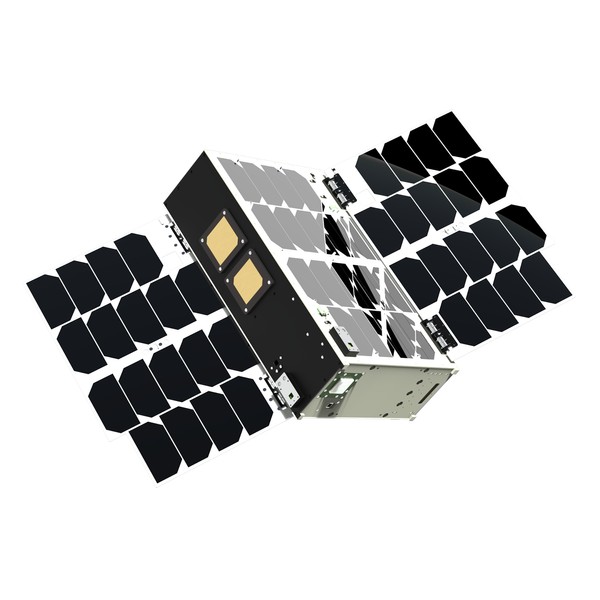
The Space Inventor 6U satellite is a platform configured from modular subsystems suitable for IOD, scientific, educational, BIU and IoT missions. The basic subsystems include power plant for power generation, conditioning and distribution, on-board data handling, communication to ground segment, and attitude determination and control system.

The Space Inventor 12U satellite is a platform configured from modular subsystems suitable for IOD, scientific, educational, BIU and IoT missions. The basic subsystems include power plant for power generation, conditioning and distribution, on-board data handling, communication to ground segment, and attitude determination and control system.

The Space Inventor 16U is a platform configured from modular subsystems and is available for geostationary orbit missions. The basic subsystems include power plant for power generation, conditioning and distribution, on-board data handling, communication to ground segment, and attitude determination and control system.
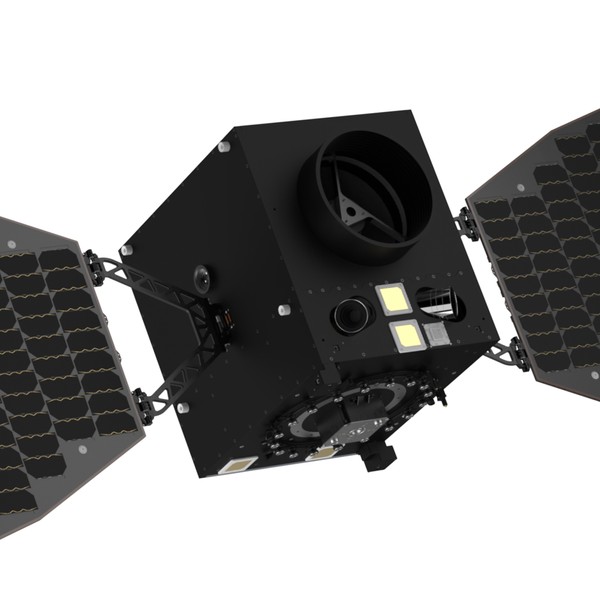
The Space Inventor Microsatellite is a customizable platform configured from modular subsystems and is available for geostationary orbit missions. The platform integration by design provides 360° access to all the internal systems. The basic subsystems include power plant for power generation, conditioning and distribution, on-board data handling, communication to ground segment, and attitude determination and control system.
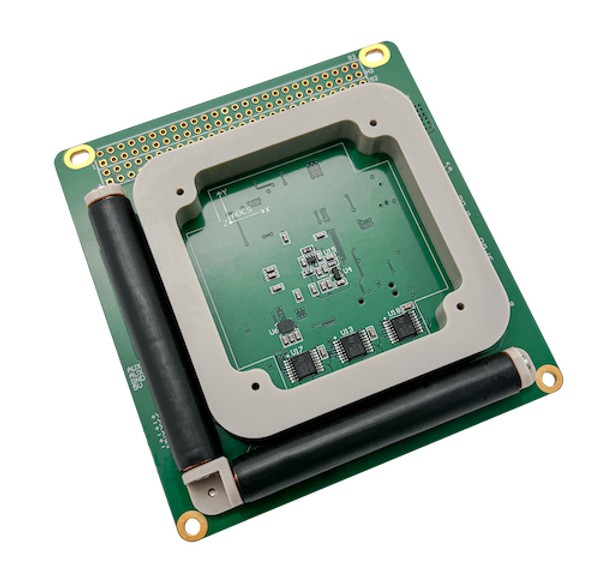
The Tensor Tech ADCS-MTQ has been tailored for simple nanosatellite missions with limited power budget and volume constraints. It includes FSS-15M (fine sun sensor with triaxial magnetometer) for attitude determination and a triaxial magnetorquer for attitude control. Its embedded control modes include magnetic dipole moment control, sun-tracking, and de-tumbling.
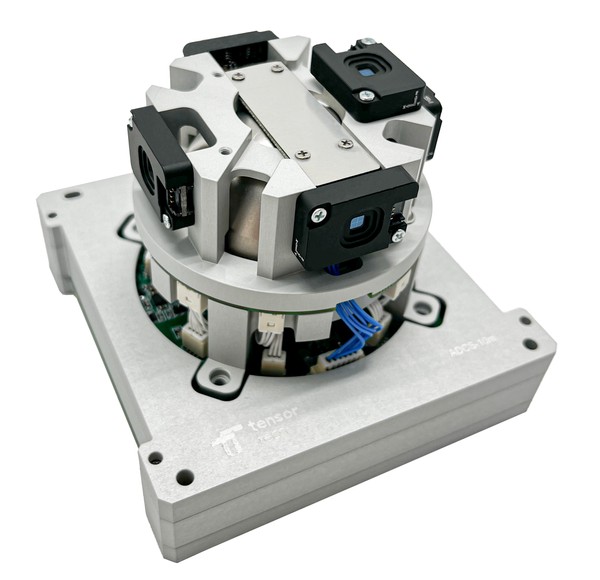
The Tensor Tech ADCS-10m is an integrated ADCS built around a variable-speed, single-gimbal Control Moment Gyroscope (CMG) suitable for 3U CubeSats. It delivers comparable performances compared to ADCSs designed for similar sizes of satellites but offers lighter weight, more compact volume as it can fit within the tuna can, and less power consumption.
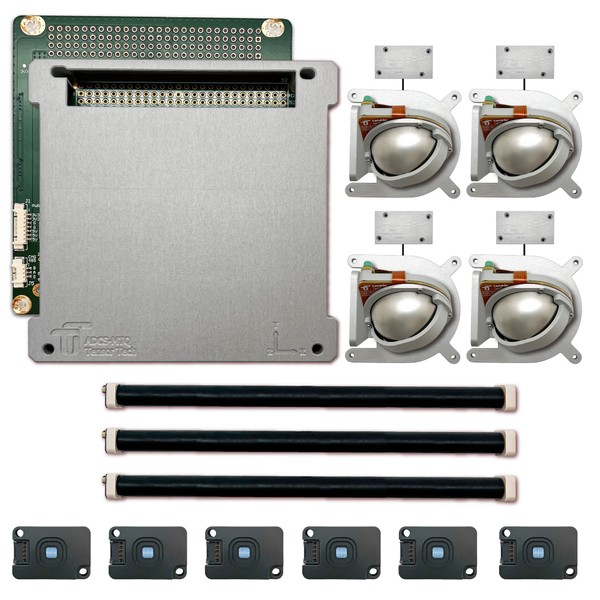
The Tensor Tech ADCS-40m is an integrated ADCS built around four variable-speed, single-gimbal Control Moment Gyroscope (CMG) suitable for 12U or 16U CubeSats. It delivers comparable performances compared to ADCSs designed for similar sizes of satellites but offers lighter weight, more compact volume as it can fit within the tuna can, and less power consumption.
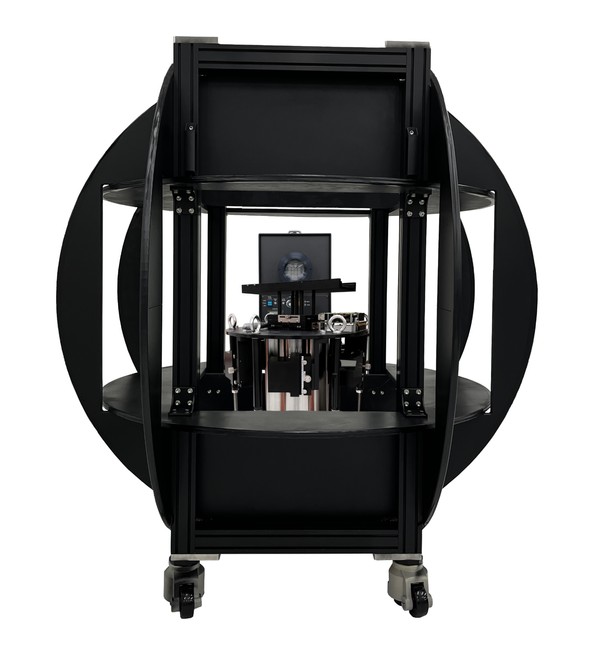
Tensor Tech ADCS TestBed is designed for CubeSats up to 16U and small satellites with ADCS weighing less than 30kg. It serves as a comprehensive tool for ADCS calibration, measurement of mass properties, and the testing and validation of ADCS algorithms. The ADCS Testbed consists of an air-bearing platform, a triaxial Helmholtz cage, and a solar simulator. It is easily customizable and can be adapted to fit customer-specific requirements.

The VEOWARE SPACE MicroCMG is a control moment gyroscope (CMG) suitable for 50kg - 250kg satellites. CMGs are attitude control actuators that consist of a spinning rotor, which is also referred to as a flywheel, along with and one or more motorized gimbals. The gimbals tilt the rotor’s angular momentum causing a gyroscopic torque that rotates the spacecraft.
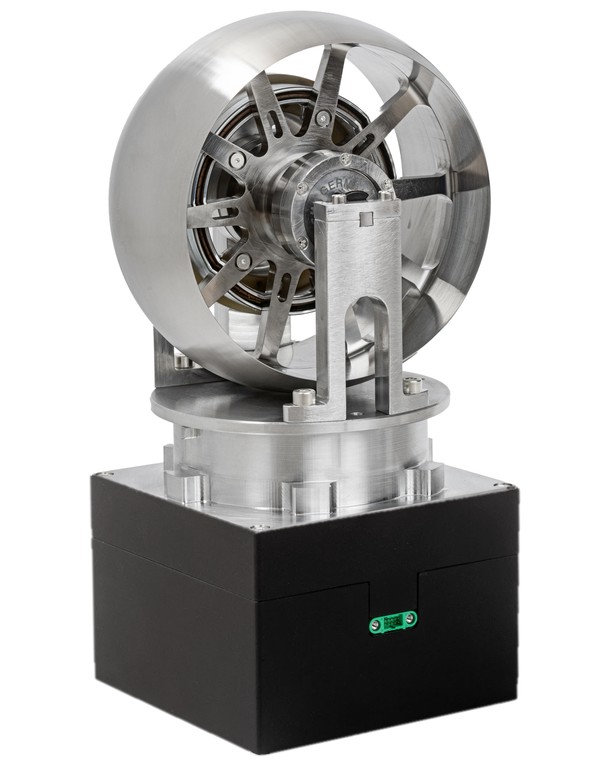
The VEOWARE SPACE MiniCMG - Control Moment Gyroscope is a control moment gyroscope (CMG) suitable for satellites above 250kg. A CMG is an attitude control unit (actuator) consisting of a spinning rotor (also referred as a fly wheel) and one or more motorized gimbals that tilt the rotor’s angular momentum. As the rotor tilts, the changing angular momentum causes a gyroscopic torque that rotates the spacecraft.
Webinar transcript
[00:00:00] Hello to everybody. Who’s just signing in to view the webinar. We just going to leave it a couple more minutes until, until bang on, um, three o’clock just to make sure that people have a chance to join, but it’s great to see so many people sign in already.
[00:00:53] Okay everybody. I am, I think we, I think we will make a start there. I think people are still still join in, so that’s great. Hello to everybody, but, um, yeah, we’ll get going so we can keep this, uh, keep us to the time. So, uh, hi everyone. My name is Hywel Curtis from satsearch and I’d like to welcome you to a webinar, a guide to selecting an ADCS for a small satellite mission.
[00:01:12] Uh, in this event, you’re going to hear from experts from six different ADCS manufacturers, discuss their technologies, their missions, and share insights on how , you know, engineers can better integrate and use it, their equipment. I wouldn’t say much more than this because it’s it’s them that you really want to hear from today.
[00:01:29] I just want to let you know, three things quickly before we kick off. Firstly, we were not going to be running an audio Q and A during the event to try and keep things short for everybody. But instead, you know, we’ve asked all the presenters to respond to questions in the zoom Q and A function. So, um, well you should be able to see this on your screen.
[00:01:45] So please feel free to ask questions at any time, of any of the presenters, and they’ll try to try to answer them when they can, when they’re not speaking. Of course. Um, secondly, if you’ve got any questions or things to share with other members of the audience today, uh, not the presenters on the topic of ADCS solutions, then the zoom chat function is open throughout and you can use this.
[00:02:07] And we also share links to each presenters, satsearch supplier hub in the chat function. So you can find out more about the company and take a look at their products and services. Uh, if you’ve got any other technical or procurement related requests, more, you know, more specific requests, then please feel free to use the satsearch platform to, to make them.
[00:02:25] And finally we are recording the session and we’ll also soon, hopefully begin an access to the slide decks of each presentation. And so we’ll send you a follow-up email with that information, the material that probably probably next week. Okay. That’s all from me for now. Thanks to all of you for being here and hopefully we’ll have it.
[00:02:41] We’ll have a great event now. So without further ado, we’ll get straight into our first presentation, which is by, by Tjorven Delabie the CEO of arcsec so Tjorven, if you could share your screen, please. Yes. I hope you can see it now. Yep. Yes. Perfect. Okay. So then I guess we’ll just kick things. So, um, well, good afternoon everyone.
[00:03:07] So my name is Tjorven Delabie. I work at arcsec. arcsec is a spin off company of the KU Leuven university in Belgium. We were founded last year, so we’re still quite a young company and we developed attitude, determination and control systems for small satellites. So that’s basically all that’s our focus. Um, so we develop full attitude, determination and control systems, which autonomously take care of all the attitude, determination and control needs of small satellites.
[00:03:33] And we also develop, um, stand-alone star trackers and reaction wheels. Um, and it’s really our goal to deliver very high accuracy, attitude, determination and control systems . On the left you can see our larger star tracker, which is around 40 by 50 by 95 millimeters and right, one of our new products, the mini star tracker, the twinkle star tracker, which is about the size of a matchbox car and which delivers very high you’ll receive as well.
[00:04:02] We have flight heritage on Simba, which is an ESA IOD tree unit cubesats, which was launched one year ago. Uh, the ADCS, was fully functional from the start. It contains, well, all the components that we made ourselves, our reaction wheels work well, the star tracker, as you can see on the right. So this is the overall performance over the entire year.
[00:04:23] Uh, that one has a cross-border site, accuracy of 10 arc seconds, one Sigma, uh, and, uh, Sagitta that I just showed you. Um, we’ll go down to one arc, second one Sigma across bore sites. So quite high accuracy and all it’s proven to work in orbit. Uh, but so it’s, it’s not a sales talk, so I won’t go into a lot of details about our components.
[00:04:45] You can contact me or go to satsearch or our website. So I tried to make my presentation, um, quite educational. So I start, um, so I pick two topics to discuss. So rather than giving a lot of, uh, more generic ins on selecting ADCS, um, I’ll be talking one about determining the pointing requirements, which I think is an important point.
[00:05:11] Um, and two on integrating testing and calibrating ADCS components. Um, I could talk about a lot of things more, but, and then you can contact me and ask questions about it. But, so I selected two things to discuss in detail with point number one, being the one that I will spend most time. And the reason I chose this point is, is that, um, there are quite a few sources that can tell you what you can get in terms of ADCS.
[00:05:37] Um, and I guess everybody who presents here, we’ll, we’ll start our presentation at seeing what they can deliver, and you can find it on satsearch and on other websites as well. But the first question you have actually is what ADCS does my mission need. And I’m going to try to give you a bit of a framework to determine what you need in terms of the attitude, determination, and control system.
[00:06:01] And it’s an important thing, because if you under specify your, um, ADCS requirements, then your satellite won’t be able to do what it needs to do with all your ADCS overly costly, but if you over specify it, then all your satellite might achieve its point, but ADCS has over dimensioned costly.
[00:06:18] So it’s important to find, the right specifications for your mission so that you can select the right system. So the, the pointing, requirements that we typically get from customers look like this. So the ADCS’ll deliver pointing accuracy of 0.1 degree. And, um, it looks fine. Um, and I guess most of the people who are watching, the webinar will probably defined our requirements in this sense.
[00:06:48] Um, but it’s, it’s lacking a lot of stuff. So I’m going to try to expand this and give you a way of formulating your pointing requirements that will allow you to improve them. So good pointing requirements contains a specified error value. Um, that one is available. So at 0.1 degree. Um, but that should also specify in which reference frame you define it.
[00:07:11] So for example, on all three axis, or maybe you want it only on one axes and you have on one axis and you have less stringent requirements on the other, or you only want it on the payload line of sight. So as an example. I had to find an, it should be half cone along the payload line of site. Um, it should also have a level of confidence because if you just say that it should be 0.1 degree and in theory, it should be that all the time and your system won’t be extremely expensive.
[00:07:39] So here, for example, it’s two Sigma. So 95% of the time, it needs to adhere to the requirement. And you should also define which type of error it is. So here it’s for example, an absolute pointing error. It could also be a relative pointing error. There are some others, but they are, uh, I would say less common to show you what that actually means.
[00:08:02] So an absolute pointing error. So if you have a system that requires an absolute pointing error, um, then that’s the actual difference between the, um, true and the desired attitudes. So that’s the big black line in this graph. You can then over a certain period of time, take the mean of that. And, um, the find a relative pointing error, which is also called the jitter, which shows the fluctuation around that mean, and to show you what each of those things, uh, does, if you have, for example, a disaster monitoring mission.
[00:08:38] So there’s a forest fire somewhere, and you want to take a picture of it. You need to have your absolute pointing error low enough to ensure that you’re looking at the correct scene. Um, if it’s the value will be pointing off from the scene, you want to see, but even if your absolute pointing errors, okay.
[00:08:56] Um, if you have a high relative pointing error, then you will shake a lot. Uh, let’s say for example, that you take, uh, an observation time of one second. So at the particular integration time over your camera, for example, one second. Uh, it will generally be lower, I assume. Um, If you’re a relative pointing arrows too high and you will have a blurry picture.
[00:09:15] So you will also want to define a relative pointing error requirements, but you also need to define is the period immature requirements needs to be a followed. So for example, only an eclipse or only during a ground station falls, or only during the five minutes that you observe a star, uh, whatever. Okay.
[00:09:40] So once you define your, your pointing requirements this way, so if you use this framework to define what you actually need, then this way of thinking will force you to think about your requirements in a bit more detail, and it will prevent over and under specifications. Um, and in the end, you, you might end up with 20 pointing requirements instead of the one that you had before, but still it will be better specified and it will not be over specified. Um, this is something that we can, we can help you with. So we’ve done this for, several ESA IOD missions, also for several customer missions. So we can define pointing requirements based on the description of the mission. We can also carry out a pointing analysis to see which ADCS you can get, which, um, here, see we can do stability analysis.
[00:10:28] So those are all things that we’ve done before and have that we can provide as a service. The second point then is, um, so I talked about pointing requirements, which is something that you need to do. The arc of your mission, um, towards the end of your mission, once you have your ADCS, you’re going to want to integrate it test it, um, so commissioning, and, but the point that I would want to make here is that the purchasing costs is often an important driver in the ADCS selection.
[00:11:00] So, um, if two systems are almost equal then, um, especially for cubesats, and smallsats, the purchasing cost will have quite high weight in determining which system you choose. Uh, but what’s often forgotten is that there’s a substantial cost link to manpower, to equipment, to facilities for integrating testing and calibrating the ADCS.
[00:11:21] So once you, um, if, if you just get the ADCS as in, in a box at your office, then there’s still a lot of work to be done to integrate it. So what I would ask or what I would urge you to do is to ask your ADCS component provider. Um, not only to send your ADCS, but also to provide round support equipment or software graphical user interface software, for example, to facilitate the integration.
[00:11:46] So preferably you will not only get made ADCS or a star tracker or a reaction wheel, but also, , the supporting equipment so that you can just, in the ideal world, hook it up to your computer and have a plug and play system that you can work work with, or get some libraries that you can integrate into your, overall satellite systems so that you can easily start working with it.
[00:12:10] What I would also urge you to do is to ask for, um, the functional test procedures and the ability to replicate, replicate the acceptance test campaign at your site. So, um, the quickly ADCS provider will, uh, carry out a quite thorough health check test or acceptance test before they send the unit. So I would urge you to ask, uh, one for procedures, how to repeat that and also make sure that you have the ability to replicate those because once you can replicate them, then you’re quite sure that you can work with the system and you know, that you have a healthy system.
[00:12:43] And as a third one, um, it, it’s really interesting to have a reprogrammable system, not only in the lab, or if you see that some functionality is lacking or, or you would have, uh, prefer to have something implemented a little bit differently, but also in orbit. So we recently did a small software update on our ADCS to tweak some performances and it’s really useful, um, if that’s possible.
[00:13:10] So, um, those are three things that I would, uh, urge you to, to look out for, um, and also to take into account that this can greatly reduce our development time project costs, and also just make you a happier person. And of course, all of this is all standard included in what we deliver. So, um, I haven’t made it a very long presentation, so I just focused on two points.
[00:13:41] One is on helping you to determine your pointing requirements. Um, so yes, make your requirements less dumb is something that we hear a lot. Um, and the, the idea that I, that I want to give you there is that if you use the correct formulation for these requirements, um, then you will get your project right from the start. Um, and for integration, testing and calibration take into account that it’s an important, um, cost driver. So ask your ADCS components to give you as much support as you can get, and that was it from my side. So if you have any questions, you can contact me. Thank you.
[00:14:22] Great. Thank you very much. That’s a fantastic way to start.
[00:14:25] So, uh, yeah. How to make good pointing requirements very useful. And then really good advice on integration and testing there. Thank you. Uh, next up we have Gerhard Van Vuuren, principal ADCS engineer at CubeSpace ADCS based in South Africa. Gerhard, if you could please share your screen and, uh, and get underway.
[00:14:48] All right. My screen should be shared and everybody see it. That’s good to go. Thanks. All right. So what I’ll be talking about today is firstly to the quick introduction of our company, um, they’re not talk about which factors influence, which factors influence an ADCS system design. Um, there’s often this. Uh, decision that, that, um, that integrators of satellites face, whether they should buy off the shelf or build it themselves. Um, and I’ll talk a little bit more about the, uh, the pros and cons of each of those. Um, and then some lessons that we’ve learned along with some interesting real world examples, right?
[00:15:31] So first off our company is also focused on ADCS only products. Uh, our first flight was in 2014. We served, uh, more than 15 missions, uh, currently in orbit. We’re located in Stellenbosch, in the beautiful South Africa. We’ve delivered more than a thousand products to more than a hundred customers globally.
[00:15:57] We offer fully integrated ADCS solutions. So everything, including hardware, software, harnesses, ground support, equipment, everything that you’ll need even a simulation tool for your ADCS. And we also offer standalone components. If you prefer the bullet yourself option, those includes reaction wheel of we actually reeled off various sizes from two U up to small microsatellites.
[00:16:23] Same goes for our magnetorquers. Then we’ve got some fine sun sensors, infrared horizon sensors in our generation two product range, a star trackers and magnetometers. There’s a nice link about, um, our team to product range. Believe it’s a video. Please have a look if you recieve the slides afterwards, our facilities include an ISO class eight clean room and a dark room where we calibrate our optical sensors, such as the star tracker and our fine sun sensors.
[00:16:52] We’ve got an animal’s cage to calibrate the magnetometers vacuum chamber with thermal control, some thermal chambers in our production facility with, humidity control. We’ve got our own vibration, table, which was recently added, as well as, a couple of staff that are IPC class three trained that’s enough for, for the sales talk.
[00:17:15] I’ll get back to the engineering, which is I’m, which I’m more comfortable with. So the first thing that I want to talk about is how requirements influence your ADCS design. Um, what we’ve noticed is that different levels of requirements influence the ADCS design. Uh, so we’ve got the higher level, the mission requirements, then the derived system requirements, and then ultimately the lower level ADCS requirements and all of those can in some way impact your ADCS design.
[00:17:47] And what we’ve noticed is that the typical top-down requirements model doesn’t seem to work for the modern, smallsat or nano satellite missions. It’s not as simple as laying down requirements on a mission level, freezing them, moving over to system, freezing them, and then. Having a subsystem requirements and then just building a system or procuring a system that meets all of those requirements.
[00:18:10] There are very often trade offs and concessions that need to be made on all levels because the hardware just isn’t out there, or we just can’t build exactly what the mission needs. So ultimately you you’ll work your way towards the ADCS requirements. Come up with that with an ADCS design, but often you’ll find that what, what is out there in the market or what you’re able to build in the amount of time that you have won’t meet, uh, requirements A and C, but it will meet, you know, the most important ones.
[00:18:42] So we’ll, we’ll be willing to drop this one or make it less strict. Um, so it’s a, it’s a very iterative process. Um, at least in our experience, then when it comes to component selection, once you’ve solidified the design. It flows down mainly from your ADCS requirements. Um, you’ve got the decision of how many of each sensor, once you’ve, for example, identified the need for a star tracker.
[00:19:13] Do you want to add a second one for redundancy? Do you have the budget to do that? Um, when it comes to actuators sizing, your, your wheels and torquers need to be sized depending on your satellite size, uh, the type of orbit that you’re going to be in the type of deployables that you’ll have the direction in which they’re deployed, that that will determine your in-orbit disturbances at disturbances, which will affect the size of your torque rods.
[00:19:42] If you’ve got a very high slew requirements. So your satellite needs to be very agile, you’ll need larger wheels with more torque or more momentum storage capabilities. And then something that I, um, I’m very excited about is component placement. That’s where you get to work with, uh, the customers, uh, CAD, and really tried to figure out and a tailored engineering solution for their specific mission.
[00:20:09] So you’ve got, uh, let’s say five or six different ADCS sensors, but you’ve also got a satellite design with a panel sticking out in this direction and an antenna sticking out in that direction. And you need to find a spot for each one of those sensors, those and make sure there’s, there’s actually available panel area for a sensor to pro to, to protrude through.
[00:20:29] Um, you’ve got the sensory field of view to take into account, especially when you’re using deployable structures. And then you’ve also got to take into account, which ADCS modes does your payload require, does your antennas or your comms system require? So if you’ve got, for example, a star tracker pointing in. And a certain direction, but you’ve got an antenna which needs to face a ground station. Will that star trackers still see stars, or will it point at the earth when you point your antenna at the ground station? And those are things that not all customers seem to think of when they’re buying or procuring their ADCS, and, and we’ve often seen that, that, uh, satellite designs need to be changed very late in the mission, just because these types of things weren’t taken to, uh, into account early enough, When it comes to the buy versus build decision, uh, there are three main options. You can either buy the entire, fully integrated system from a third party supplier. You can buy standalone components and then build the system yourself. Then you’ve got to think about, uh, your software. That’s going to run the system that I believe can also be outsourced. I’m sure there are companies out there that do that, and then you can build the entire system yourself. So from the ground up, um, build everything or at least most of the components, yourself
[00:21:56] um, in this decision, there will be various stakeholders. So on the lowest level, you’ve got the technical stakeholders. If you cannot find an off the shelf solution to meet your requirements, you obviously want to go for the bullet yourself solution. If you’ve got the technical capability to do that from a commercial perspective, the company might want to push outsourcing rather than vertical integration, which will lean more towards the buy decision.
[00:22:21] And then you’ve got, of course the programmatic, uh, stakeholders, which will push timeline the most. And if your timeline simply does not allow a self-build option thing, you have to go for a buy option. But in principle, there are three main factors when deciding whether to buy or to build and that’s risk time and cost.
[00:22:43] Unfortunately, I can’t provide a nice one, answer one liner for whether or not you fire a bolt. Um, every mission is different and there are pros and cons to buying versus building. Uh, I’ll start with the pros of buying the first and most obvious, uh, pro there is that you’ll leave each years of ADCS experience, not only from the supplier, but also from other customers that have flown the suppliers. ADCS it’s in most cases, the shortest lead time, and there’s virtually zero development costs. There are cons to buying a system. Uh, it’s not always optimized for every mission. The suppliers generally build a, a generic solution, which can fit most missions and it’s not tailor made for your specific mission.
[00:23:33] And you’re going to be dependent on a supplier one or more suppliers, which is not necessarily always a good thing. Then you could argue that there’s a higher cost per system versus building it yourself, but then you’re not taking into account. The massive in are either nonrecurring engineering costs that you’ll have to incur when you build it yourself.
[00:23:54] There are good things about building a, an ADCS yourself. You can tailor, tailor, make the system for your specific mission. You’ve got no dependency on any certain party. If you choose to build everything yourself. And it, it’s a very, very nice, uh, uh, vertical integration strategy to get all of that development in house, if your company supports that strategy. But there are of course, cons to building it yourself. I’ve mentioned most of them you, you firstly require a whole development team, ADCS, engineers, electrical engineers, mechanical engineers, and software engineers. Those are all the components that make up an ADCS um, the development time is usually in the order of years, if you, if you’ve got a, um, a very narrow solution that you’re working towards a could be less than a year, but it’s usually in the order of years to develop a full ADCS for a, for a larger mission, you’ve got massive investments or non-recurring engineering. And there is of course increased the risk because you’ve build something that’s new, which has a very low TRL.
[00:25:01] There are many options out there and you’ll be, you’ll be wise to choose carefully things to consider is reliability and what the TRL of the system is and whether or not there’s evidence, so qualification reports, uh, in orbit reports, the reputation of the supplier in the industry, which other companies are using this system or the supplier, if you can find information like that out there, how’s how stable is that supply chain? Um, how long is the lead time? Not only for one or two off, but if, if you expand your company and you’d start ordering 10 or 20 or 50 units at a time, can your supplier handle that? Um, will they still be around for your next mission?
[00:25:43] It’s also a question you need to ask yourself and then most important does does, does the integration into your mission of that system makes sense? You’ll have to take into account mechanical integration. Um, how does the system get bolted onto your spacecraft? Uh, what’s the electrical and the software interfaces, all those configurable at all.
[00:26:03] And how much effort is it going to be on your side to accommodate that system? Which ADCS has modes or available? Can that be expanded? If you’ve got a very custom control mode that you want to, can your supplier implement that for you and how easy is it to operate the system then something that you’ll thank yourself later for is, uh, checking the support structures of the supplier.
[00:26:25] How well is there documentation? Um, how much support, uh, equipment do they give you? Both hardware and software. Um, and, and how can they support you during commissioning and operations of your system? I listed cost here on the right, but I put a little, uh, uh, ban sign on it because even though costs of, of ADCS systems are fairly large and you want to go for something that’s cost effective.
[00:26:55] All these other, um, considerations are much more important than cost you’ll end up spending a lot more in man hours. If you don’t. Um, if you don’t pick a supplier that meets all of your needs in these other areas, then just lastly, some lessons that we’ve learned. Uh, in the process of building an ADCS and we were recently with our generation two product line come across this quite often. And that’s, if it’s new, it usually takes longer than you expect it. So it’s good to always add margins. And that includes when you’re building your own spacecraft, you know, adding margins for, uh, for lead time, from suppliers, adding margins for testing your ADCS and calibrating it on ground.
[00:27:41] Uh, if it’s something that you’re doing for the first time and lesson we’ve learned as well, hire a good project managers to make sure everything happens on time and everything is taken into account when you’re planning your project. You rarely get it right the first time. If it’s something that you’re doing, that’s new allow for mistakes to be made and add, uh, a margin or, um, extra buffer into your timeline for additional design iterations.
[00:28:09] And I cannot emphasize testing your system enough, tested, uh, for race conditions for age cases, uh, tested in a realistic in-orbit environment. And that’s that ties nicely in with my last point. You must have a simulation tool if you’re going to be building an ADCS. So you need to know how your algorithms will interact with the space environment, how it will interact with, uh, the satellite body, um, and, and having a proper simulation tool that can tell you what your mode and your configuration will do under certain conditions is a must.
[00:28:47] During the tests and integration, we’ve also learned a couple of lessons. Um, I’ll just quickly run through those. So there’s a very big misunderstanding. Um, in, in general, about the concept of an ADCS coordinate frame versus just your normal mechanical CAD frame. We often see, see customers not taking into account that the ADCS has its own built in coordinate frame, and it with its own sensors has a certain knowledge of how the satellite is oriented in orbit.
[00:29:20] And what, what does zero roll pitch in your mean to do the ADCS and that’s not necessarily the same as your X, Y, and Z definition of your mechanical CAD of the satellite. So make sure you know, what the translation between your frame and what the ADCS thinks, the frame. The most important sensor of your satellite is the magnetometer, except for your pilot, of course.
[00:29:45] Um, but in the ADCS so that’s by far the most important, if you don’t have something like reaction thrusters to de-saturate your wheels, you need to use magnetorquers to de-saturate your wheels. If you don’t have a proper magnetometer measurement, you can’t use your magnetorquers properly. Um, magnetometers are easily disturbed and disrupted by sources, such as solar panels, fasteners APS, electromagnetic valves, and which is why we normally recommend a deployable magnetometer as well as adding a redundant magnetometer.
[00:30:19] And important test spacecraft in all operational modes, they might be, uh, uh, a payload or a subsystem that’s only used in certain scenarios and it might generate a significant magnetic disturbance. And you want to make sure that you capture all of those operational mode when you’re testing your magnetometer on ground.
[00:30:40] And if you’re having a sort of moving on from the magnetometer, if you’re having a deployable appendages, such as antenna or solar panels, make sure that when you have sensors with a field of view, such as, uh, somethings are a star tracker, that you don’t have any of these sensors in their field of view.
[00:31:00] I know it sounds, it sounds obvious, but we often see customers that don’t take that properly into account
[00:31:09] and they lastly , for testing and integration. We’ve often seen problems with EMI. Those have to do either with ground loops where, uh, know different grounds either from the chassis or the structure, um, or from antenna, or just connected at random with other grounds. And you eventually form ground loops, which firstly disturbed the magnetometer.
[00:31:31] But secondly, causes noise on power lines, which can affect, uh, components like star trackers in terms of its measurement accuracy. And then for EMI, we’ve often seen cases where long harnesses or used and the notorious ice grid C bus of cubesats is especially susceptible to EMI. Uh, there’s a good example where a, a satellite designer had, uh, an ADCS on the one side and EPS sort of, uh, perpendicular to that, with a harness running from the ADCS across the EPS to a magnetometer and the magnetometers measurements were, uh, were continuously corrupted because of the EPS, current being generated and causing EMI interference interference on the harness. And they eventually, our solution was to shield the harness.
[00:32:23] So watch out for that when you’re integrating and planning your cable hoochie in the satellite. Um, some learnings from, from in orbit, um, adding margins to exclusion angle specifically for star trackers is, is a good thing. Uh, we we’ve learned from, from some in-orbit images that the atmosphere is clearly visible, um, in eclipse to, to start trackers
[00:32:47] it’s of course not intentional to take a picture of the. Um, but when you, when you do take, uh, exclusion angles of the sun, the earth and the moon into account, it’s always good to add a little bit of a margin in there. So with the atmosphere, instead of, um, having the Earth’s edge, be your, um, your calculation point for the earth, exclusion angle, rather use the atmosphere, which, uh, in, in the images that we’ve seen is roughly 70 kilometers, uh, from, from, uh, from the earth atmosphere that that’s actually visible in a star tracker image, very faintly, but enough.
[00:33:24] So to, to cause disruptions to the algorithms, um, it’s, it’s very necessary to have a safe mode, especially for high spin rates. Um, we we’ve seen cases where, uh, multiple cases of satellites being accidentally spun up either by an operator. Accidental firing a thruster and, um, having, uh, an ADCS with a safe mode, capable of tumbling from very high rates is it could be mission savings. So take that into account. And then lastly, but I couldn’t stress it more check the polarities of sensors and actuators. In the very early days of, of our ADCS expeditions, um, we almost had a case of, uh, a torquer, rod being, being flipped in polarity. And luckily that was caught very close to integration. Um, but make sure that, that you, firstly check polarities of actuators on ground, but then secondly, that you have the ability to, uh, to stop polarity in orbit, if that’s ever needed.
[00:34:27] That was it from my side. If you do have questions, pop them in the, in the Q and A section, I’ll answer them as I have time. If you’ve got more questions, feel free to reach out, um, to info at give space, and yet we’ll answer them as they come in. Thank you very much for listening. Great. Thank you very much.
[00:34:44] Go ahead. That was really interesting. I think that’s great. Take over the end as well. Spin up, not spin down really important for spin out.
[00:34:54] Uh, next year we have, uh, James Barrington-Brown CEO of a NewSpace System. So James, when you’re ready, if you could please share your screen. Thank you very , that’s perfect.
[00:35:11] Thanks, um, of meat and we see my screen. Thanks for much. Um, yes, I’m very wide spies words. The previous speaker, uh, I’m glad, or at least I’m hoping so far people have been talking about the ADCS control algorithms themselves. I’m an electronics engineer, not a control engineer. So I’m going to be talking a lot about, uh, hardware and electronics.
[00:35:34] Um, so, uh, yeah, just a couple of slides from NewSpace. Uh, we, uh, heritage goes back to 2008 where I set the company up in the UK, moved down to South Africa in 2013, started up, uh, 2014, uh, quietly a Cape town, actually not too far from CubeSpace. And we’re exporting also around the world, uh, 27 countries last year.
[00:35:57] And we are baseline on a number of what I call the current platforms, um, which means prime contractors, who are supplying different missions to different, uh, end customers who basically use the same platform architecture and they’re using our components for those kinds of things. Um, I mentioned it cause I’m around now just over 30 years in smallsat business.
[00:36:19] And it’s amazing to see the growth in the last last few years. I mean, back in the day, there was maybe only 20 primes you could bid to. And now there are several hundreds, I believe, especially including the, the university groups who were doing, uh, cubesats. So what do we do? We do ADCS and that’s why we’re on the talk.
[00:36:38] Um, so sensors, we’re looking at stars. We have a, a unique, uh, product who was Stella Charro, some senses the earth we take to using magnetometry, um, on the actuator actuator side, where the interaction with. And we believe it’s still yet to hear anybody contradict this to be the largest torque rod maker in the world.
[00:36:58] And we won the one week contract and a couple of other constellations. So we’re churning these things out a thousand a year. So very high volumes to know where you are and all that people haven’t mentioned that much yet have a part of an ADCS system. You need to know where you are. So we do GPS receivers and the antennas to go with them and we train our people up to the European space agency standards.
[00:37:19] Um, so we also have some people just using us for manufacturing. So I’m going to talk about scaling up because I see a lot of the talk, uh, that the presenters here are from the cubesat community. We’re very much in the microsoft community. So I wanted to talk about some of the issues when you scale up from the smaller systems to the larger systems, and you basically have a matrix of four different options.
[00:37:43] You can have integrated. Um, hardware with the algorithms built in. You can have integrated electronics without the algorithms. And I’m just going to do a little plug for this. You’re the first people to see this little box on the, on the right a box is a card it’s actually a magnetic control system for cubesats, which we’ve managed to get into a very sexy shape, mainly because we’ve come up with a way of generating magnetic magnetic fields using flat electro magnets.
[00:38:11] So the electromagnets and the XMR two buried into the structure, even a nice hole. So you can put your wheels, you can put a camera through the middle, but a star tracker through the middle. So yeah, that’ll be a, that’ll be coming out soon. And then of course we deal with components and I’ll show you some solutions components with the algorithms built in and we’ll say without.
[00:38:32] So in terms of scale up, we’re seeing a lot of our customers are starting off with cubesats to do some kind of payload, demonstration, or mission demonstration things that you can’t really do on the earth. Uh, and then they tend to be moving up when they move to operational systems into the larger end of cubesats 6U 12 U uh, and also into microsats.
[00:38:53] And of course there’s, as mentioned earlier, the actuators will scale, at a scale with mission size, the larger, the mission, the larger the actuators you need. And of course, when you get to a, a bigger volume, uh, if you need to have only coverage, for example, working at the sun and your sun sensors, can’t be put into the same box. They need to be mounted on the panels either side. So you’re getting to some of the harnesses use that just mentioned, um, maybe someone will talk about different architectures of ADCS, but you can have a single computer, uh, which does everything in the housekeeping actually control system controls the payload or distributed systems.
[00:39:30] We can have a dedicated computer just for your attitude control. Um, very much of the mind of distributed systems. If there’s many computers on your satellite, as you can each having their own tasks. Um, but some people now are, for example, taking their, um, starmapper algorithms and putting them on onboard computer rather than the algorithm sitting inside the star mapper itself.
[00:39:53] There’s a number of different architectures you can look at. And I wouldn’t get into the details of that, but fundamentally, a lot of people complain that don’t really standards in cubesats. There are even less standards in microsats. At least you’ve got some physical standards in cubesats. So microsats are very much a wild west, many different suppliers, many different architectures, many different system designs.
[00:40:14] And as soon as you start getting larger, I’m going to, I’m going to talk a lot about, um, total lifetime cost. Anybody heard by other podcasts with satsearch, I was talking a lot about total total lifetime cost. And when your satellite gets more expensive and the components you buy get more expensive and because your larger, your launch gets more expensive, you start getting driven towards, um, redundancy, cross strapping.
[00:40:37] Uh, and again, that, then you need to take that into account when you’re working on your,ADCS system is is difficult to cross strap, especially when it comes to reaction wheels. So not just size scaling, but a lot of people now are talking about constellations, both a cube sat and micro sat. Um, so you’re doing a one-off.
[00:40:56] In which case do you really need as was raised earlier, if you really need to do all your design yourself, but then you also start asking if I’m going to build a hundred units. Do I really want to be paying a license for actually control algorithms? Every time I launch a satellite? So there’s some trade offs to be made there.
[00:41:13] Um, interesting. Uh, brought up the, um, the vertical integration thing. I think this is, this is a myth now. I mean, I’m, I’m from UK and I have great respect for the SSTL guys. You were one of the fathers, or probably now the great-grandfathers of small sats, uh, and they couldn’t get hold of components. They were there, they were so new to the market.
[00:41:34] So they did everything themselves. A lot of people have been trying to copy the success they had. Um, but the market has matured and there are now people like ourselves and other suppliers who are making units by the tens or the hundreds or thousands. And we’ve invested in the manufacturing capability, the design for manufacture design for tests, the processes, ERP systems, unless you’re building a thousand satellites, your non-recurring is always going to be greater than just buying components or algorithms from a third party.
[00:42:06] So I’m a big fan of having a value chain where you depend on other people’s investments to offer products. And again, it’s down to the total cost of ownership. If you look at the price of one torque rod and you say, wow, that’s expensive for a bit of wire wrap round tube of metal, then you’re really looking at the system from the wrong point of view.
[00:42:25] You gotta think about, uh, um, how long it’s taken someone to develop that system to achieve that. And then there’s a great part, uh, paper, which I hope some of you have seen the early, if not come off to the massive website. So paper called reliability of zero. It’s written by the name somewhere, bill 30. Um, and that was mainly aimed at not overdesigning spacecraft to achieve a very high reliability, but it also applies to buying things off the shelf.
[00:42:55] If your mission is to deliver a communication system, IOT was to deliver images to the ground. And you’re a year late because you spend all that time developing your own components and algorithms. During that year, your mission has zero reliability. You’re not delivering any service. So, and you’re also not generating any revenue.
[00:43:15] So I’m a very keen bid proponents of buying things off the shelf. If they’re available. Also, if you have a very specific mission, you have no choice, but to develop your. So, if you’re looking for solution, here’s my kind of go-to list of what I think should be your drivers. And of course, this is open to discussion, but I believe in scalable architectures.
[00:43:37] So trying to keep a similar spacecraft architecture, whether it be cubes that size 12U 50 kilos, 500 kilos, 5,000 kilo, um, basically things need actuator control system. They need a communication system. They need a, a power system, a computer. So try and keep your architecture the same, um, because all companies are moving up the food chain and building bigger and bigger satellites.
[00:44:01] So try and avoid redesigned time by having scalable architectures and likewise modularity. You want to be able to change out your actuators and the next mission, um, technology moves on suppliers disappear. Um, so keep a modular system that allows you to chop and change. And then, um, yeah, lessons learned and mistakes people make.
[00:44:23] I mentioned there are standards, but I mean, people do use, I squared C people do use as 42 in space, wide things, make sure it’s the standard standard. Um, there are people running, um, URLs at non-standard speeds. There are people using canvas with different cooperates and, um, a mistake, lots of people make is they assume if they buy five different suppliers, can bus interface to components to they’re gonna work on the same canvas.
[00:44:51] Everybody uses different protocols. You put the address fields in different places. They put a big Indian, little Indian, they put the DataBank different. Um, so you really need to take into account that and buying two things with the same interface. You can’t put them on the same bus. Vendor independence, I think is really critical for the reasons I mentioned.
[00:45:10] So I’m just going to go through a few solutions. I have to say, despite the years I’ve had in the business, I’m not quite seeing where the market’s going. So we’re hedging our bets. And working in a number of different areas. And again, it’d be great to get some feedback of which areas people are looking at.
[00:45:27] So I call those modular systems with our algorithms, built in modular systems, without the algorithms, and then a kind of catch all which is a hybrid between the two. So a good for instance, choose space. You have just, uh, just been talking, uh, we worked closely with them and the nice thing that they’ve done is they’ve taken their heritage computer from there, cubesat system and their heritage algorithms, put it in a different type of box, added some modularity of the physical level, which they will cubeconnect because they call everything cube something, uh, and that allows you to then basically be vendor independent.
[00:46:02] You can plug in anybody’s wheels or magnetometer, so it doesn’t have to just come from them will just come from us. And then it gives you a standard interface back to the onboard computer. Um, they also offer the service of doing the simulation of the mission for you to make sure everything is sized. So it’s a very easy way of coming in and buying a microsat sized system.
[00:46:24] The downside is that, um, yeah, it comes with these algorithms. Um, there is some modularity, so you can develop your own, uh, but you basically are stuck with, with the, the computer that comes with it. And, uh, not too much flexibility in the algorithm development. So that then comes the hybrid version. Um, we’re working at another company in Germany called spin.
[00:46:47] They have a nice box called magic, which, uh, is based on a Juul called Geisler , which is, uh, a rad-hard, um, processor, the have developed a number of drivers to talk to a number of different vendors, uh, components, including our own. Um, but they leave the ADSS the ADCS software. To yourself, or you can work with one of their partners to develop the algorithms and then put it onto their machine being jewel core, it’s quite easy to integrate because you run the HDCs on one core and their drivers on the other core. And potentially you can actually use it as the, the overall onboard computer for the, uh, for the, for the mission. Uh, and then the, the, the, the way I’m betting things will go just because the background, uh, anybody who’s not familiar with the ESA speaking RTU is a remote terminal unit.
[00:47:40] And the traditional way of building a big satellite is you choose your actuators and your sensors. And then you build a dedicated box that interfaces, all that complexity of different interfaces to a single interface that talks to a computer. So we’ve come up basically with a, with a bit of hardware, which doesn’t have a processor in it, but it is a packetising system.
[00:48:03] So you can talk directly from one end of the. Uh, systems the other in the native language of what you’re talking to and the reaching and the packetisation takes care of all that. So that’s transparency. And because it’s a rating system, you can have multiple sources and multiple targets, um, and automatically reread those.
[00:48:25] So that if you have a redundant system, you can choose which processor talks to which system on which port. Um, so it’s a very, very flexible piece of hardware that, um, well, again, lean means your vendor dependent, modular, and a scalable architecture. So in conclusion, yeah, to look at total ownership costs, I don’t just look at the cost of the individual components.
[00:48:48] Look at how that fits within your non-recurring costs. Your launch cost, your mission cost for payload. Everything should be balanced. You shouldn’t save money in one area because it’s going to cost you more money somewhere else. Um, Because scalable not just, look at modularity, which means independent particular vendors.
[00:49:08] Um, forget about this myth that you have to do everything yourself. Um, the market is mature enough now to have good supply chains. And if you need to buy something, you will find someone, uh, competitive. Cause there are a lot of people entering this market. Now think about time to market. If you’re an operator or you’re you’re, even if it’s a science or even if it’s a university mission, you know, you want to get your mission out there as soon as possible.
[00:49:30] Otherwise your PhD or your thesis will be over by the time you get, you know, with data. So constantly think about your total cost of ownership, both financially and schedule wise. Thanks very much. That’s all I have. Great. Thank you very much, James, some really interesting insights on the challenges of scaling and the opportunities of scaling up to larger satellite sizes.
[00:49:51] So that’s great. Thank you. Uh, next we have, uh, Jacob Nissen listen, Chief Sales Officer of Space Inventor. There you go, yeah, Jacob. You’ve already shared, so thank you. You can see my screen. Yep. Find a way how to operate. There we go. So I will not talk about too much about space in venture itself. Uh, we are based in, uh, in Olberg in Denmark.
[00:50:21] Uh, we are specialized in both cubesats and microsatellites, and we build complete, uh, satellites, including the ADCS systems. Uh, we are, also very much involved in, in, in projects and missions were very accurate, uh, pointing requirements exists, and also with very low jitter applications. One of the other things that we are working on is also a little bit more challenging, uh, ADCS systems where you also, where you are going to geo where you need propulsion system to do your orbit, uh, transfers and orbital, uh, maintenance as well.
[00:51:04] But, uh, we’ll go directly into most of the interesting points. And if you want more about space events, that they can go to our website and have a look at, uh, at our products and our history. Um, I think one of the things we will go through is all the different aspects of designing, uh, the ADCS system. And as, uh, some previous speakers has talked about is, uh, If you want to do to this, right, then you always start with your requirements and make sure that you are actually are defining the right requirements for your mission.
[00:51:40] And you are not just taking, uh, the best opportunity or the best numbers you can find on the internet and then put that into your requirements. So I think as a like cube space said, uh, this is an, a kind of an, an art where you are balancing, uh, the requirements with the, with the system requirements and mission requirements, and then try to make a good balance with your mission operations and your, your ADCS system as well.
[00:52:11] One of the things we see quite often is that people are putting quite strict requirements to your pointing, but if you haven’t, for instance, Uh, communication mission, uh, with, uh, an antenna with 80 degrees of, uh, opening angle or beam width of your antenna, then there is no point of making a 0.1 degree accuracy of your pointing that will just add a more cost to your mission as such.
[00:52:40] Uh, and I think also one of the biggest mistakes when doing the, the, the requirements and specifications is to talk about, you know, is it, uh, one segment or segments, uh, because these kinds of numbers will have a kind of big impact on actually the cost of the, of the AGCS solutions at the end. So from, from our point of view, uh, as, um, as James talked about it’s, uh, that the ADCS system. Needs to be a kind of, uh, a generic approach, which we are taking with an very distributed, open act, uh, architecture with the distributed software components that we can program in, in orbit. But for our point of view, ADCS is the most complex system that you have on the satellite bus. I’m not talking about the payloads, but for the satellite bus itself, the ADCS is, is a critical point.
[00:53:44] Uh, and also what we hear also today and mainly in the, in the entire, I would say cubesat industry, everyone is so focused about the hardware and what are the different performance of the hardware. And. Actually in an ADCS system, the software is the most critical item you have in the system. You need to have reliable, uh, software that, uh, robots for different sensor, errors, errors in your, your actuators, et cetera.
[00:54:18] So you will actually have, uh, maintain and, and mission operations, uh, during the lifetime of the satellite. So I can only point out that yes, software is a very critical, uh, topic or, uh, point in the ADCS system. Uh, so when you are scaling your system, of course, you need to figure out what kind of pointing requirements you ha you have.
[00:54:45] And for me, and for us, we, uh, we are more or less determined whether we need to star trackers is in the system or not. So if you are going below zero or around one, one degree pointing accuracy with one segment, then, then you should consider having a star tracker into your system. And if you have really strict requirements, then you probably need two star trackers, I guess, uh, if you need a accuracy on all three axes, uh, also it’s not only the size of the satellite, that that will scale how, how large reaction wheels you’ll have.
[00:55:24] Uh, it is also what as mentioned before, what kind of maneuver. Uh, do you want to do with your satellite and how fast are you doing all the maneuvering? So the faster you need to do the maneuvers the larger wheels you will have also pointing modes for your software is also quite critical for this, uh, designing your ADCS system.
[00:55:51] Uh, and also how does your ADCS system actually also work together with your power intake? Uh, we do solutions where we can do not here pointing while we are doing power optimization with the, uh, free, uh, uh, what’s called access. The last free degree of freedom. Yeah. And new. And then finally, also propulsion systems, uh, is something you should also consider when you’re doing system.
[00:56:22] I need to do some orbital, uh, maneuverings and station keeping in your orbit. Then it might be worthwhile doing a propulsion systems. Otherwise you need to go into drag management as well, which is also a possibility. So we provide all kinds of, uh, products, uh, for star trackers down to one arc seconds. We do big range of, uh, reaction wheels from very small for a one U or three U satellite up to a hundred kilos of a satellite. So big range for our reaction wheels as well. Uh, some of the, the performance, uh, we are looking into is, uh, stability and jitter of the entire. Uh, mission and ADCS system. And of course, as I said, software is quite important to actually control the ADCS system and make sure that you actually also can combine how the ADCS system works, uh, with, with also the different payloads.
[00:57:34] So you can actually control that you run in a very stable mode while you are taking images, so you will reduce your, your data. And then of course, one of the biggest contributions to jittering your satellite is the reaction wheels. So make sure that, uh, your, uh, reaction wheels are, uh, being balanced, uh, very precisely.
[00:57:59] Uh, at Space Inventors, we are balancing our own wheels. Very precisely. When we are plannings in the wheels, we are actually putting some pen markers on the wheels and we have to compensate how, how these thoughts are made on the wheels, because if they are not equally spaced around the wheel, then we can measure that, uh, just a weight of, uh, the ink of the pen, uh, and also what the other people has said, you know, regarding the performance.
[00:58:33] Uh, it’s very nice to have simulation tools that actually can simulate. How is the ADCS system working in this specific orbit? Uh, so you can actually see how all the maneuverings is is doing and how your control control loop is, is compensating for the different disturbances. One of the things we’ve done as well and seen as a very nice feature is that we can actually also run our simulation tools on the hardware itself that will do the calculations.
[00:59:07] That means that we also, uh, eliminating different implementations that are done on the escalate, the physical hardware that will fly in space, uh, conscious cessation errors, et cetera, that will exist on, uh, on the, on the computer itself.
[00:59:25] Uh, some of the, uh, business line as well, when we’re going into the integrations. I think it was also mentioned before that, you know, field of view, uh, of the different sensors need to be taken into account. Uh, and also that reflections from solar panels or, or deployable solar panels are not, uh, being, you know, making distortions into your sun sensors for instance.
[00:59:53] Um, otherwise, uh, we need to make sure that, uh, that different stones, uh, offer the, uh, the mission. So sometimes you need to make sure that the star tracker is not in the sun. Uh, yeah. And I think finally, uh, I can’t remember who mentioned that as well, but one of the things we’ve seen is a coordinate systems, uh, is also very, very important to keep track of.
[01:00:27] It’s basically, if you are integrating everything yourself, you need to make sure that the different sensors that you put on the different panels are registered and make sure that the coordinate systems are being aligned with the, your software also. One of the things we’ve seen, uh, for selecting an ADCS system is actually how easy is it to do the commissioning of, uh, of the ADCS system?
[01:01:00] Uh, how quickly can you get it and how can you tune it, uh, during the orbit uh, so having the right system, uh, with, uh, with a very open and, uh, you can say easy access to all the parameters in the system will actually save you quite a lot of money and time. Uh, when you’re doing the in-orbit, the assistance.
[01:01:25] One of the things we also done is, uh, to make sure that the commission is done more easily is to make sure or actually automate some of the calibrations we have, uh, especially our magnetometers. Uh, and then also we have done. Quite a big, an effort of, of making it very easy for, for doing in-orbit, the tuning of the ADCS systems without uploading new software, but just, uh, changing the parameters of the systems, uh, with the system we use with the pyramid, a pyramid system, we can actually also during an orbital change, uh, you can say how fast the, uh, the, uh, ADCS software should react, uh, on, on the different maneuvers that we are doing gains and everything like that, uh, easily.
[01:02:24] Yeah. So. Also on lifetime. Uh, I think we have some of the usual suspects for the wheels that you, the more you use the wheels, the shorter lifetime it will have. So if you have quite a lot of maneuverings that requires a lot of, uh, talk, then that will also impact your, your lifetime. Uh, one of the things we are doing for, uh, expanding the lifetime, uh, above the five years that we normally have is to run the wheels as momentum wheels.
[01:03:04] That means that we are biasing, uh, the wheels. So we will only operate, uh, without, uh, having any zero crossing off the wheels that will have an extremely impact of, uh, of the lifetime of your, of your wheels. Then, uh, then also for the star trackers is, uh, sorry. Uh, we, we, we actually, for the star trackers is, are using rad-harderned components and that’s actually the only component that we have in our geostationary satellite mission sets let’s for the star tracker.
[01:03:44] So all the optics we use is for rad-harderned. And so it will not get darkened by the, uh, by the, by the light and radiations, and also the sensor is a rad-harderned component because it is exposed to quite a lot of radiations. Uh, since all the electronics are more, uh, shielded by, uh, alloy in inside the spacecraft.
[01:04:12] So. Uh, be aware of, uh, the optics for the star tracker and a sensor as well, especially if you want to have a longer lifetime of your satellite mission. I think there was a very short introduction and, uh, go through some of the experience we have. Uh, if you are getting more interested in the products we have, you’re more than welcome to send me an, uh, an email and I’ll be happy to answer all your questions you might have.
[01:04:42] And of course we’re available in the Q and A system as well. Yeah. Thank you. Brilliant. Very much. Yeah, that was great. very interesting, uh, next up we have Thomas Yen, CEO at Tensor Tech. Hello. Hey, Thomas is sharing. There you go. Great.
[01:05:05] So, uh, good afternoon, ladies and gentlemen, it is my honor today to be invited here, to give you a sharing about a guide for selecting an ADCS. For your satellite mission. And, uh, so what is the objective of, uh, engineers and here an engineer? So I’m referring to the people who are working for the satellite owners, then the company who own the satellite and they have to build a satellite and operate the satellites.
[01:05:37] So I believe their, uh, first, first priority is to extract value from this satellites so these engineers should be focused on the payload and how to utilize the satellite buses to get, uh, the payloads to have this, uh, optimal performance. So, uh, this comes to an important, uh, question that, uh, I think many people are managing and explaining for it is about how to, uh, determining the pointing requirements for your mission, because it is very important to get the best use of your, uh, your, your payloads.
[01:06:16] So, uh, criteria as including like the pointing knowledge of your individual components, such as star tracker on the pointing knowledge of your whole ADCS. So here are a little bit different because, uh, the, like if you have a star tracker and the while star Trek is installing on your integrate ADCS or yourself, built ADCS, there will be some misalignments of these components.
[01:06:44] So, uh, usually the, uh, pointing knowledge of your ADCS will be lower than the component lab. And then while you are installing these, uh, ADCS uh, into your spacecraft, there will be another misalignment. So the, the overall pointing knowledge of the spacecraft will be lower. And if you are installing a payloads until this spacecraft, and then the pointing knowledge, oh, and the pointing accuracy of this payload will be lower.
[01:07:15] So these are things, uh, uh, users should be keeping in mind by or making your criteria’s. And then the absolute pointing accuracy and relative pointing accuracy where, uh, relative one is usually referring to, uh, the jitter. So people are, are maybe less familiar with relative pointing accuracy. So actually these is, uh, of thrift of attitude divided by uh, by a period of time, for example, like, uh, like 30 seconds or like one a milliseconds, depending on the user’s, uh, application. So usually we have best scenario that’s, uh, uh, optical payloads that are taking images, uh, to, to, to earth. So these, uh, image or these cameras, they have exposure time to capture the image.
[01:08:05] So if the satellite attitude is say is shaking by via taking images, then their past resolution will be of the image will be some degradations. So, uh, while you are building a remote sensing satellites, the related pointing accuracy is a very important criteria and there are also still rates that’s. Uh, how fast can your ADCS, uh, to, to change the angular velocity of your, of your satellite?
[01:08:35] So, uh, let’s break down to different types of satellites. So they are all a remote sensing satellites. If you have a narrow field of view, then the absolute pointing accuracy will be very important because if you are a satellite is tripped too much away from your target, its uh, object. Then you’re target, objects will be out of your, uh, the field view of your, uh, camera.
[01:09:03] And, uh, there are communication satellites. Usually they require, uh, less, uh, uh, less sophisticated, uh, uh ADCS because the pointing requirements are, uh, usually lower than a remote sensing satellites. So for example, if you are using a USAA app antenna, and usually these antenna omni directional so you didn’t need to have a, uh, a good, uh, pointing requirement.
[01:09:29] And so even if you were installing X-band antenna on, your satellite, and then the, if you have four degree of, uh, uh, angular deviation, and the only costs a 0.1 DB of loss is for the antennas and, uh, the higher, the communication frequency you are using. And usually these antenna requires a more, uh, more and more, uh, uh, more requires a better pointing, accuracy.
[01:09:57] Before most of the cubesat satellite mission, people may use a S-band or X-band antenna. So you dont you maybe don’t need a, uh, sub, pointing accuracies as a pathogen, uh, or one degree or 0.1 degree. And, uh, if your cube set has something like a deployable antenna and the , you should be, uh, watching that, uh, if you were as, uh, these ADCS should be able to provide a maneuver to let, uh, the solar panels to capture a sun.
[01:10:35] So, uh, after knowing they’re pointing requirement of permission, here comes to, several different methodologies of building an ADCS so traditionally people are used to, uh, designed and built manufacturing every component from ground and then to integrate their whole system. So this is. Uh, the, the old days, the space agency driven days that, uh, people cannot find available vendors from market.
[01:11:03] So they build everything from ground. And then, uh, since the, the space industry becoming more and more mature and then the dividens of, uh, laborers are getting more and more professional. So there are some vendors provide a commercial off the shelf, uh, components, so people can pick up the reliable components and integrate their own ADCS.
[01:11:27] And according to our investigation, that’s, uh, most of the, uh, cubesats are built by the second methodologies. Nowadays, but there are also another, a trend is popping up. That’s, uh, people started to, uh, purchase integrated ADCS which, uh, the vendors help the people to integrate everything all together from the components and then help them develop the firmware, the algorithms, and then also operation.
[01:11:57] So the, uh, so-so, the users does not require to, uh, to, to build the ADCS, uh, everything by themselves. And I believe this is a trend for the market because every, uh, every things are getting more and more professional. And then there are also always the fourth method that you can always hire a contractor to build your satellites.
[01:12:22] And these contractor could purchase components or prejudice. They integrate the ADCS and build the ADCS for you. But today’s talk, I will be focused on method two and method three. Uh, major. So, uh, if you, you are adopting methodology two that, you’re buying components as integrate your own ADCS they are a couple of things you should be aware of that, including when you are picking up a reaction wheels, and there are some specific specifications that are other than the angular momentum or the torque is, are learned magnetic disturbances, specification, and those solar imbalance of the water, which is a major contributor of jitter.
[01:13:06] And then, uh, when you are choosing your attitude sensors, uh, especially you are choosing the image based one, like a star tracker, and then they usually have a lower update rate. So, uh, these sensors are usually limits your bandwidth of your control system. And if you wanted to have a better update rate, then your power consumption with it gets a larger and so while you are implementing your own ADCS yes, there are system errors are quite occurs to, to for these, uh, self ADCS builders, uh, because you are where you are trying to align the different component trends there, even you are using more cutting pins. And then, uh, the sensor will have some deviation or misalignments while installation.
[01:13:55] So, uh, this causes, uh, the, that, that degradation of performance and those are the nature of the components. They are random errors for these, uh, attitudes, sensors. And then if you are implemented algorithm by yourself, and then there might be some human error, that’s your algorithm may have some price parts or may behave not, that’s not the way you just think it will be in space.
[01:14:24] So it’s important to have a software in the loop simulation, and then also the hardware in the loop simulation. But, uh, both of these two massive is taught to read the, uh, the relative uh, uh, pointing accuracy. So it requires people to take efforts to get to those things, uh, to, to be done with the way that I, by the way.
[01:14:48] So, uh, here’s the introduction of, uh, uh, the pros and cons of using integrate ADCS that’s. They are usually more expensive than, uh, your, your, your, your, your purchase individual component and integrated system by yourself. But of course, there are also benefits because you don’t have to, uh, develop algorithms by yourself and do a calibration, and then, uh, and then save a few manpowers
[01:15:17] so, uh, uh, but if you count these equipment costs or the manpower costs and time cost, in fact, maybe, uh, ADCS, uh, integrated ADCS would be a more reliable and the economical for you and here I divide the, uh, the ADCS into three, a category by its pointing accuracy. And there are a purely a tracker based ADCS.
[01:15:41] They are just say around 10 degree of pointing accuracy. And then there are a reaction wheel base, but without star tracker and the one was star tracker, which is the most expensive and the most sophisticated one. And this, these different ADCS at different pricier as a cost. Of course. So, uh, finally I would like to introduce you, uh, with, uh, several, uh, findings that’s, uh, that I observed on the trend of this ADCS industry.
[01:16:12] There are some, some people companies are developing the, like the system identification, methodologies, uh, uh, like, uh, to determining the mass properties, uh, information on orbit are using their developed softwares and then they are Adrial Southwest utilizing CMGs control moment, gyros to have a better a slew rate compared to a traditional solutions.
[01:16:38] And then the other component is always driving the technology to go to go further. So they are attitude sensors with higher optic rates. And then the I’m going to introduce you with a Tensor Tech a unique offer, uh, a control moment gyro that is based on the sofrito promoter. So, uh, these, uh, Sabrico motor base CMG is a comparatively smaller than a traditional CMG because they utilize it. And multi-access actuator, which can provide people with a smaller Barden weight, uh, with, uh, compared to the traditional solution, which is the one you see in the picture here. So, uh, yeah, this is, uh, this is my presentation today. And since for your listening, Great. Thank you very much, Thomas. That was great.
[01:17:29] Great insights there. Thank you. And then, uh, finally today we’ve got, uh, Arne Broeders, Embedded Software Engineer at VEOWARE SPACE. This perfect , sharing on your screen. Thank you. Yeah. And that should have popped up. So hello everybody. Today I look value the technology and efficient, fewer control moment gyroscopes.
[01:17:54] So something that was briefly mentioned before. Um, so we will try to educate you about what control moment gyroscopes are for those of you that don’t know what they do already function. We will briefly go through how’s and but’s uh CMGs uh, before we focus on what Veoware has to offer as solutions. Uh, CMGs. So Veoware is a company founded in 2016 developing core skills and competence in, in orbit mobility.
[01:18:28] So as a young company, we started with our focus on satellite attitude, control technologies, more specifically development of CMGs for small satellites, small satellites. We understand small satellite, smaller 500 kilograms. Um, I am, I’m a Buddhist. So as mentioned before the embedded software engineer, uh, of Veoware, and currently I am mainly busy with, uh, firmware for our CMGs
[01:18:55] so what is a CMG? Um, the CMG mainly consists of a wheel, a wheel that. It’s mounted on, a certain axis that can spin this we will go the spin axis. Um, the core functionality of a CMG lies within the ability to control the direction of thisaxisaccess. Uh, so we need some kind of rotating platform that can reorientate this spinning axis
[01:19:28] um, in real life, we didn’t get something like this, which is the CMG that was used for the, as a space station. Um, and obviously this would not fit a, um, Yeah, small satellites. So we came up with this, um, and as you can see, we are spinning wheel, uh, which we can reorient with a small platform. Um, now how does this work?
[01:19:53] So when we spin a wheel, uh, we create a, uh, angular momentum, which is held by the wheel that is spinning. Um, by reorientating this wheel. So by turning the spin axis or the flywheel, the gyroscopic torque perpendicular to the angular momentum will be created in the plane of rotation. Um, the amount of torque is determined by the rate of change of the angular momentum does the speed with which we rotate the platform on which the wheel is mounted by controlling the direction of this angular momentum. We can interact with the Dodo angular momentum of the, of the satellites, uh, which allow us to influence the attitudes of a spacecrafts. Um, and here you see, uh, What this looks like in action. So we keep track boss. Well, here we have, uh, four CMG. So as with reaction wheels, we need four CMGs to create a full momentum envelope.
[01:20:58] Um, and we can see here so the wheels spinning on top of the rotating platform, uh, which are reorientating the direction of the spin axis on the wheels. And then in this case for a earth observation mission, we can reorient the, or, or yes, we can control the attitudes of the satellite, um, in it’s orbit um, now our sales team has noticed that the awareness of the existence of CMGs on the market for small satellites is not always present.
[01:21:33] And when searching for actuators, uh, often the search is done with reaction wheels as a keyword. So we’ve made a small overview with two technologies to compare how they work and what they do. So CMGs and reaction wheel both rely on the principle of momentum conservation. Um, with a reaction wheel, this momentum is fixed in the direction of the spin axis.
[01:22:02] Um, while with a CMG we can redirect this, uh, direction or the momentum by turning the rotating platform um, um, since the. A change of angular momentum creates torque um, the change of magnitudes of this angular momentum makes or creates the torque in a reaction wheel while in a CMG. Um, this is done by reorientating the wheel.
[01:22:35] So by moving the direction of this moment, um, for those of you involved with electromotors, uh, you can directly see that, uh, in, in terms of power consumption, um, a CMG, so rotating, um, a wheel at a constant speed will be much more efficient than, uh, spinning a wheel up and down constantly. So, uh, yeah.
[01:23:04] So what did we do? We had a good look at the. Bigger example, we miniaturized it. Um, uh, this is what we came up with. Um, we believe that the CMG is, uh, the most performance actuator type for attitudes control in small satellites. Um, for example, to reach the performance of a CMG, you could boost a reaction wheel to, uh, playing with, uh, input voltage of your reaction wheel.
[01:23:31] But even with that reaction wheels, uh, will not suffice to reach the, uh, potential of a CMG. Um, Also, uh, we have a small lead time and thirteens idle free. Um, currently, where are we with this technology? So we are almost ready to step into the market with two CMGs we are currently, uh, planning an IOD for the second quarter of 2022.
[01:24:01] Um, as you can see the technologies de-risked with the support of, uh, the European space agency, um, in these. So most of these pictures are also from, uh, the test facilities, uh, of aesthetic in the Netherlands at east. Um, our approach also involves modularity as already mentioned by James. Um, so we approached the CMG actually as a scalable building block.
[01:24:29] This means that, um, for performance requirements that not, uh, that cannot be met by a cluster of four CMGs, um, we can equip bigger satellites with multitude of, uh, CMGs that are similarly oriented. Um, so yeah, for example, we can fit up to 16 CMGs in a big satellite. Um, you also see mentioned in the slide that’s, uh, weak targets satellites that are from 50 to 500 kilos, and you can ask why, why won’t we go smaller than 50 kilos, our modular, um, approach involves that we have some, um, components that will not change when we, um, make the CMG smaller. So for. Starting smaller satellites, you would only need a smaller room, but the rotating platform and the control electronics, which are part of one module, uh, with not Trent. Um, and that’s why we believe we found a sweet spot with our micro CMG.
[01:25:38] One of the two models I will introduce, um, where we found a good balance between the mosque module and potential torque, uh, it can deliver. So, so this is, um, our micro CMG, which we like to compare with, uh, a 1 ms reaction wheel. Um, for those of you familiar with, uh, reaction wheel, you can see for the Moss and the peak power, uh, and the momentum in the wheel is holding we can create a lot of torque. Um, the same can be set for its bigger product, uh, which we call the mini CMG and compare it to a four MMS reaction real, um, Where for the same story for the Moss big power and the momentum and tools we can lot of torque um, both CMGs are equipped with a common interface. Uh, you work can be implemented, uh, on requests.
[01:26:39] Um, and currently we have two, uh, engineering models available, um, or the both, the both, uh, models are available as engineering models, uh, and flight models will be available close to our IOD. Um, in the second quarter of 2022 to now, what do you get when you combine, uh, four of each model, uh, to have a full attitude control system.
[01:27:10] Um, well, along the pitch roll, pitch roll and yaw axis, um, who didn’t get four, four micro CMGs almost two NMS and four, four mini CMGs, uh, above six NMS, um, which then can create, uh, one Newton metre uh, along each axis for micro CMG um, more than 3 Nm for mini CMGs, um, the big power mentioned is, uh, if we do a, um, a maneuver, um, at, uh, or maximum speed along or around one of the axis um, for, for one second, um, And for a cluster, you will then come to seven, approximately 7 kilos for micro CMGs and 11 kilos for mini CMGs
[01:28:03] um, um, we also want to mention that CMGs are not, or it’s not a technology that shouldn’t be exclusive to your, uh, or if you choose for CMGs that it should not be exclusively CMGs in your attitude control system, but that CMGs can be combined with reaction wheel. So they both rely on the same principles so you can combine them.
[01:28:28] Um, Yeah, a discount, for example, be the case in missions where you have your, or your need, you need, uh, more agility along one axis than another one. Um, our modular approach also involves that you can, uh, arrange, uh, these, these modules in your satellite as you want, um, so I’m going to, on the left, we have an array approach on bottom, we have a linear approach, uh, and the right top is actually demonstrating that, um, every CMG can be placed in a different location in your satellite. Um, so every module holds its own, uh, communication, , control electronics. So, um, it’s perfectly possible to scatter through your system. Um, yes. Um, this is the end of my presentation.
[01:29:32] I want to thank you for your attention. And I am here for questions or require more information by CMGs or what we can do for you. Uh, you can always, uh, pop a question in the Q and a, uh, or contact me by email and, uh, I hope you learned something more about CMGs and, uh, what they paid me for your control attitude system.
[01:29:56] Thank you. I know that was, that was great. Thanks very much. Um, I’ll just say a few brief words to finish up, but while I do, please do feel free to submit any questions you might have for Veoware where based on that presentation that you’ve just viewed, um, or indeed for any of the other presenters today. So firstly, thank you to all six of our presenters today.
[01:30:14] I think you’ve done a great job explaining how an ADCS works in space missions and what engineers need to take into account when selecting and using them. Just to go through a few of the highlights quickly. I think we we’ve learned about how to develop better pointing requirements, advice on the trade-offs in components, selection, the buy versus building for the ADCS integrated ADCS.
[01:30:35] Testing and integration. Sorry. Put my teeth back in testing and integration and the importance of, um, simulation tools in particular scaling up to larger satellite sizes, uh, trends in the ADCS sector, CMG technology, we’ve you really guys really packed a lot in, and we actually are almost bang on the 90 minutes, which is great as well for everybody’s time here.
[01:30:58] Now we’ve all had to get used to more online events over the past 18 months. And hopefully you agree with us that the format can really bring huge value. I think that that, and the quality of the information you’ve heard today demonstrate that, and you didn’t even have to leave home to hear it. So if you have any further questions or feedback for us or the presenter. Um, after the end of the event, please feel free to reach out to them or contact us at [email protected]. We’ll make sure every message gets a response. As mentioned. We’d also follow up with you with the footage and the available slides soon by, by email, too. And if you’d like to hear more insights like these from people working at the cutting edge of the industry, we also run a weekly podcast called The Space Industry.
[01:31:42] James mentioned it in his speech, so he was, um, the, the most recent guests that we’ve published there. And you can find it on all good streaming platforms and on the satsearch blog too. And, you know, we have a weekly newsletter that shares trending news stories in the industry and updates on both our members work like the, like the developments you’ve heard today.
[01:32:00] Um, and some of our own work as well. The link to sign up to this should hopefully be in the chat box there. Yes, it is. Um, so yeah, that’s it. Uh, thank you very much to everybody. Thank you to all the presenters and to everybody listening with us today and, um, have a great rest of the week and the weekend.